 +7 (495) 785-95-25
+7 (495) 785-95-25 lcard@lcard.ru
lcard@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
На кафедре многоцелевых гусеничных машин и мобильных роботов МГТУ им. Н.Э. Баумана выполнена работа по исследованию повышения проходимости роторно-винтового движителя (РВД) и оснащенного им транспортно-технологического средства, то есть его способности эффективно передвигаться по различным типам грунтов (глубокий снег, песок, переувлажненные болотистые и илистые местности). Роторно-винтовые вездеходы обладают хорошей проходимостью на перечисленных выше сложных типах грунтов.

Рисунок 1. Одна из моделей роторно-винтового движителя.

Рисунок 2. След, образованный в результате взаимодействия роторно-винтового движителя (РВД) с грунтовой массой.
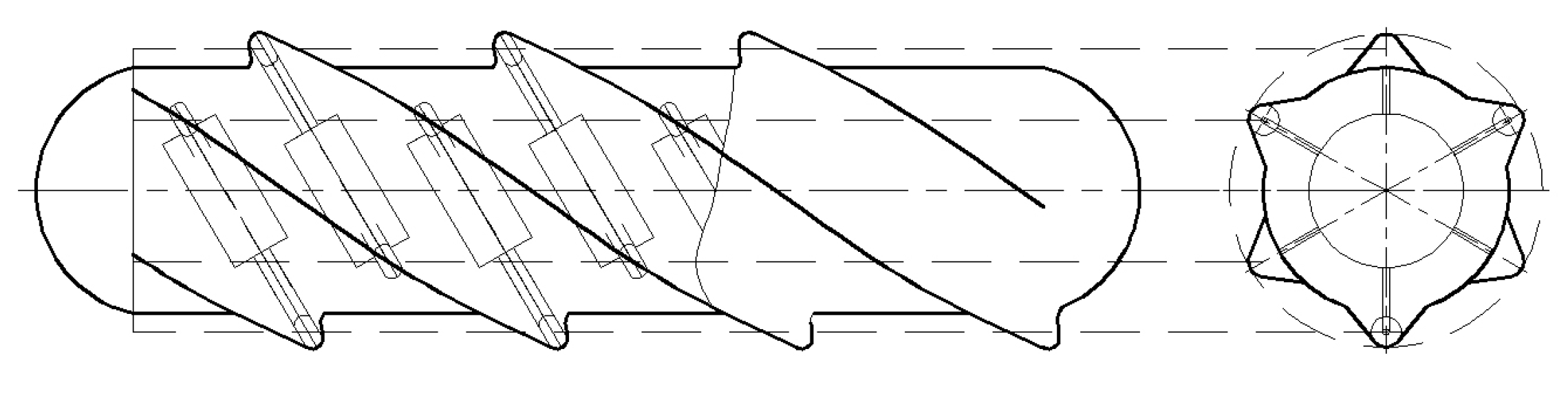
Рисунок 3. Принцип формирования волны эластомеханическим движителем.
Основной идеей предлагаемой конструкции является использование в качестве движителя механизма, передающего момент от двигателя на эластомеханическую оболочку, входящую в контакт с грунтом. Такого рода движение напоминает перемещение винта в неподвижной гайке, но в рассматриваемом случае необходимая для движения резьба (винтовая лопасть шнека) навита не на полый (обычно металлический) цилиндр, а формируется на оболочке при помощи расположенного внутри механизма (рисунок 3).
Рассмотренный в теоретической части диссертации результат модельного взаимодействия резинокордной оболочки с роликами механизма формирования волн показан на рисунке 4.
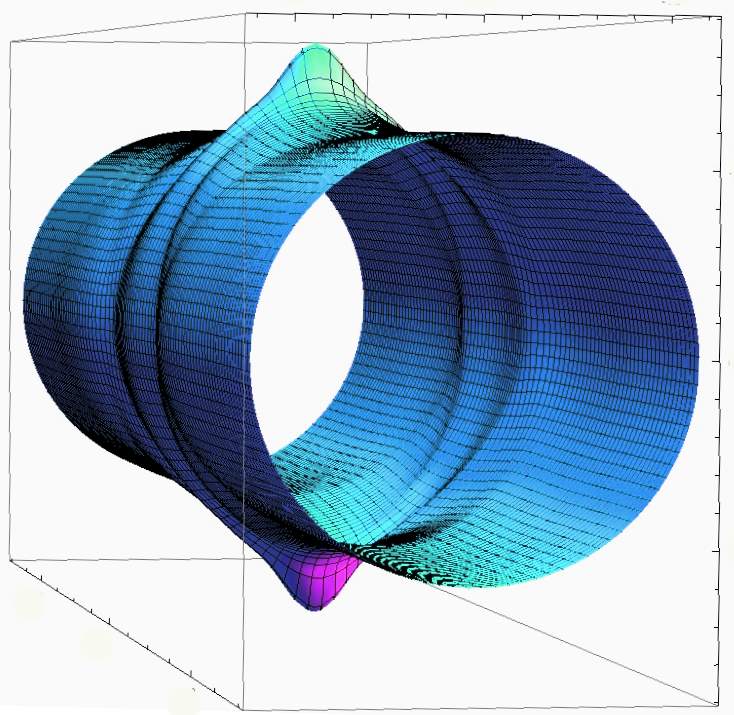
Рисунок 4. Форма деформированной оболочки при наличии одной пары колес генератора волн.
Лабораторная установка для испытаний элементов предлагаемого эластомеханического роторно-винтового движителя включает грунтовый канал, динамометрическую тележку, систему регулирования вертикальной и тяговой нагрузки исследуемого движителя, систему подготовки грунта и пульт с тензометрическим, кинематическим и регистрационным оборудованием.
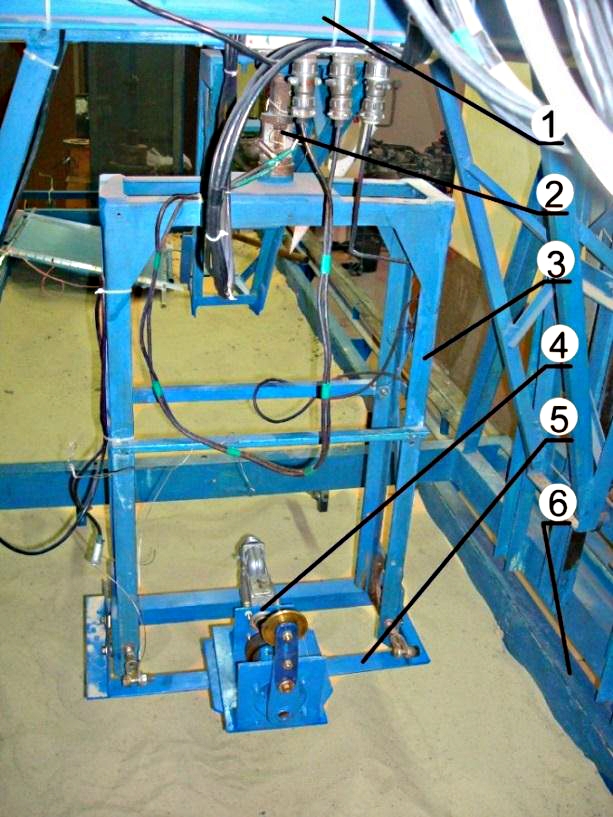
Рисунок 5. Стенд испытания эластичного движителя: 1 – подвижная ферма с роликами, фиксирующими ферму в горизонтальном направлении; 2 – тензометрический стержень; 3 – поворотная вилка; 4 – модуль генератора волны; 5 – промежуточная рама поворотной вилки; 6 – тензометрическая тележка с вертикальными направляющими.
Измерения продольных и поперечных усилий на оси механизма и продольного перемещения осуществлялось при помощи датчиков, установленных на стенде. Регистрация силовых факторов производилась при помощи тензодатчиков, подключенных по полумостовой схеме к аппаратуре тензометрической на несущей частоте 4АНЧ-22, содержащей блок питания, генератор с четырьмя усилителями мощности для питания измерительных мостов и четыре усилителя несущей частоты (рисунок 5 слева). Запись сигналов с датчиков производилась при помощи АЦП Е14-140M (рисунок 5 справа) c использованием ПО LGraph2.

Рисунок 6. Регистрирующие и обрабатывающие устройства: аппаратура тензометрическая на несущей частоте 4АНЧ-22 (слева); внешний USB- модуль АЦП/ЦАП L-CARD E14-140M (справа).
Проведённые экспериментальные исследования позволили уточнить значения тягловых усилий движителя и проверить влияние параметров глубины погружения ролика реактора и угла подъема винтовой линии РВД на величину контактных усилий в процессе взаимодействия движителя с грунтом. Установлено по результатам эксперимента, что увеличение глубины погружения ролика реактора на 10 мм приводит к увеличению продольных сил в среднем вдвое.
Источник:
Бяков К.Е. Диссертация на соискание ученой степени кандидата технических наук «Разработка методики расчета и выбор рациональных параметров эластомеханинического роторно-винтового движителя транспортно-технологического средства». – М. – 2015. – 181 с.
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон: +7 (495) 785-95-25
Письма и запросы: lcard@lcard.ru
Отдел продаж: sale@lcard.ru
Мы работаем с юридическими и физическими лицами, пожалуйста, прикладывайте реквизиты при оформлении заказа
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск