 +7 (495) 785-95-25
+7 (495) 785-95-25 lcard@lcard.ru
lcard@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
Судя по научным публикациям [1], [2], универсальный модуль сбора данных E‑502 был успешно применён учёными из Кыргызстана при создании зондирующего устройства (ЗУ) для обнаружения подземных кабельных линий и трубопроводов.
Исходя из предложенного авторами метода зондирования, индукционный зонд (ИЗ) является индукционным преобразователем магнитного поля в электрический сигнал и содержит приемную ферритовую антенну (ФА), а также рамочную антенну (РА), причем РА совмещает функции передающей и приемной антенн (рисунок 1).
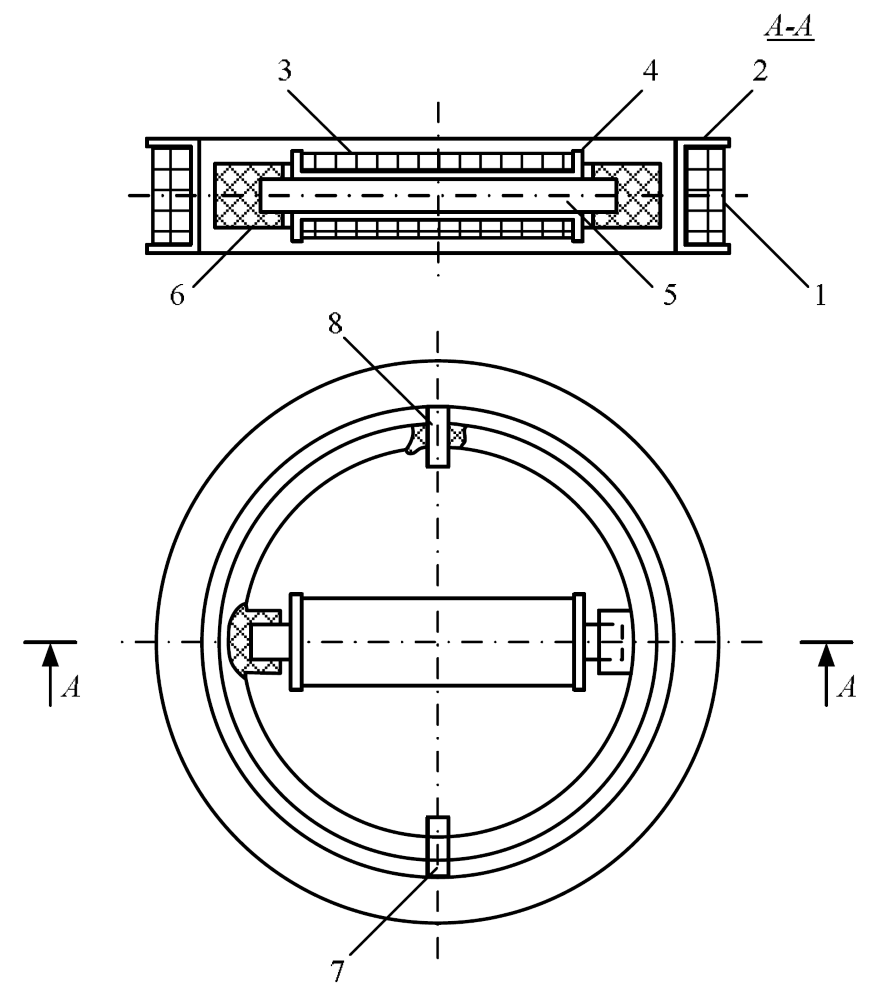 |
Рисунок 1. Вариант конструкции индукционного зонда на базе ФА и РА: 1 – плоская многовитковая РА; 2 – кольцевой диэлектрический каркас; 3 – многослойный соленоид; 4 – диэлектрический каркас; 5 – ферритовый цилиндрический сердечник; 6 – диэлектрический кольцевой кардановый подвес; 7 и 8 – цилиндрические штифты. Предложен вариант конструктивного исполнения ИЗ с компланарным размещением ФА относительно РА, который обеспечивает полную геометрическую компенсацию первичного поля. При работе ИЗ информация регистрируется по одному информационному каналу от РА (текущее значение амплитуды возбуждающего тока) и по двум информационным каналам от ФА (текущие значения амплитуд напряжений соответственно активной и реактивной составляющих выходного сигнала ФА). |
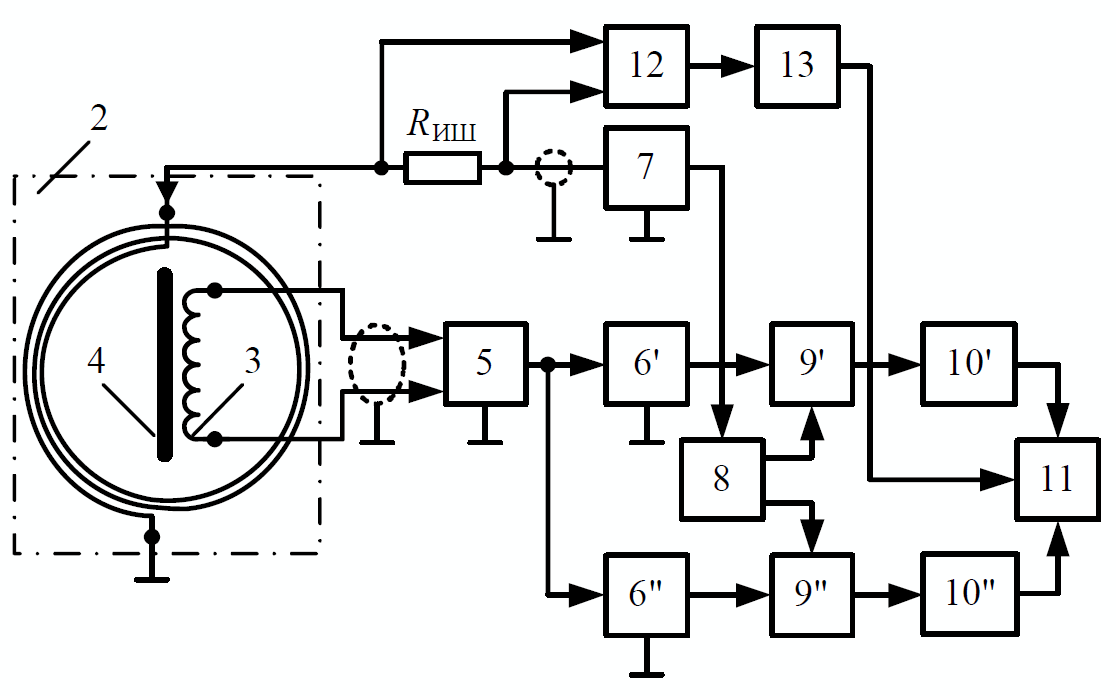 |
Рисунок 2. Структурная блок-схема схемотехнической реализации зондирующей установки: 1 – ИЗ; Rиш – измерительный токовый шунт; 5 – измерительный усилитель; 6' и 6" – буферные усилители; 7 – генератор синусоидального напряжения звуковых частот; 8 – формирователь квадратурных опорных напряжений; 9' и 9" – синхронные детекторы (СД); 10' и 10" – блоки АЦП; 11 – регистрирующее устройство; 12 – измеритель тока в РА; 13 – блок АЦП. |
Первичная и вторичная обработка аналоговых сигналов осуществлялась посредством разработанного авторами электронного модуля на базе операционных усилителей, а аналого-цифровое преобразование сигналов реализовывалось на базе стандартной системы сбора данных E‑502 (блоки 10', 10'', 15 структурной схемы на рисунке 2). В качестве переносного регистратора использовался ноутбук, программное обеспечение которого было ориентировано на реализацию измерительного алгоритма и соответствующую визуализацию результатов поисковой процедуры.
Экспериментальные исследования функциональных возможностей ЗУ, реализующей гибридный метод индукционного зондирования, проводился на различных образцах объектов поиска (ОП) и на определенных глубинах их залегания во вмещающей среде, представляющей собой песчано-глинистую породу. Максимальная погрешность определения глубины залегания ОП в среднем составила 10‑15 % на 2 м. При этом четко идентифицировался материал образца ОП и безошибочно определялась трасса его пролегания. На глубинах не более 0,5 м для третьего варианта сечений жил кабеля была выявлена возможность определения дефекта в виде обрыва одной из основных жил.
Результаты экспериментальных исследований подтвердили в целом работоспособность варианта схемотехнической реализации ЗУ и эффективность предложенного метода индукционного зондирования.
В работе [2] описано ПО для визуализации, обработки, анализа и регистрации данных, полученных с помощью трассоискателя на базе модуля E‑502 для поиска подземных электрических кабелей. Отличительными особенностями подобного программного обеспечения является необходимость фильтрации и анализа данных в режиме реального времени с возможностью привязки результатов трассировки кабеля к карте местности с помощью GPS.
Работоспособность предложенной в статье модели программного компонента трассоискателя продемонстрирована разработанным на языке Python ПО, позволяющим эффективнее бороться с помехами и точнее определять расположение кабельных трасс. Интерфейс пользователя состоит из главного окна и вспомогательного окна с картой для визуализации найденной трассы кабеля. В главном окне расположены элементы интерфейса, позволяющие выбрать и настроить устройство сбора данных (рисунок 3), также здесь находятся графики исходного и отфильтрованного временного ряда и скалограмма исходного ряда данных.
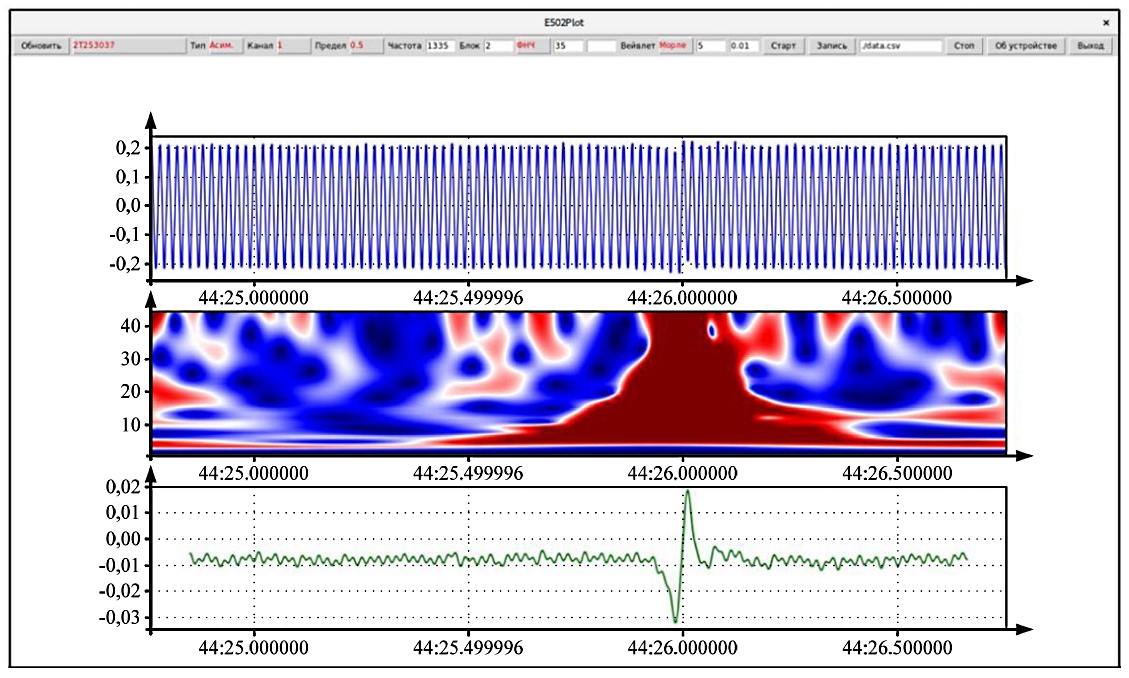
Рисунок 3. Главное окно программы.
Для визуализации координат найденных кабельных линий предусмотрено специальное окно (рисунок 4), позволяющее по отдельным точкам измерений создавать и редактировать найденную трассу кабеля, а также экспортировать результаты работы в графический файл в формате PNG.
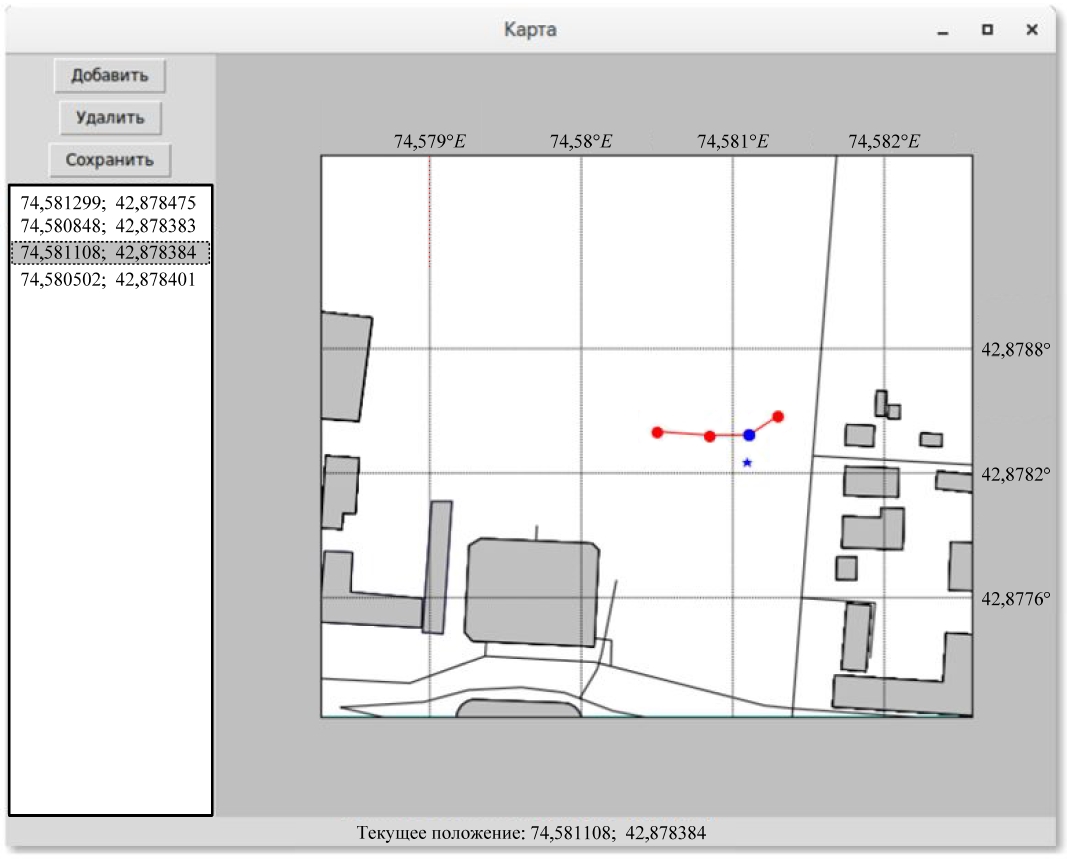
Рисунок 4. Диалоговое окно карты с нанесенной на нее трассой кабеля.
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон: +7 (495) 785-95-25
Письма и запросы: lcard@lcard.ru
Отдел продаж: sale@lcard.ru
Мы работаем с юридическими и физическими лицами, пожалуйста, прикладывайте реквизиты при оформлении заказа
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск