 +7 (495) 785-95-25
+7 (495) 785-95-25 lcard@lcard.ru
lcard@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
Специалистами Московского политехнического университета был предложен манипуляционный робот отечественного производства РМ-01 с интегрированным отечественным трехкомпонентным устройством силового очувствления [1]. Кроме трехкомпонентного датчика усилия в состав робототехнического комплекса для контроля силового взаимодействия входил программно-аппаратный комплекс на базе среды проектирования LabView с системой преобразования аналоговых сигналов в управляющее воздействие на манипулятор. Согласование работы трехкомпонентного силового датчика с роботом выполнял человеко-машинный интерфейс, реализованный на базе персонального компьютера, специализированных контроллеров и специализированного тензометрического АЦП LTR212 в составе крейта LTR. В статье рассматриваются элементы интерфейса с тактильной составляющей для обучения и графической составляющей для настройки ввода-вывода данных о необходимых усилиях и движениях инструмента робота.
В усовершенствованном роботе РМ-01 с возможностью программирования усилий и использованием биомехатронного модуля был применён трехкомпонентный силовой датчик отечественного производства BC6W (компании K&K Group). С роботом, содержащим этот биомехатронный модуль, были проведены основные исследования методов обучения (рисунок 1), протестировано взаимодействие с биологической мягкой тканью.

Рисунок 1. Биомехатронный модуль на базе силового датчика BC6W.
На рисунке 2 приведена функциональная схема системы обучения путём демонстрации непрерывной траектории с учётом деформирования мягких тканей с многокомпонентным силовым датчиком, расположенным на фланце конечного звена робота.
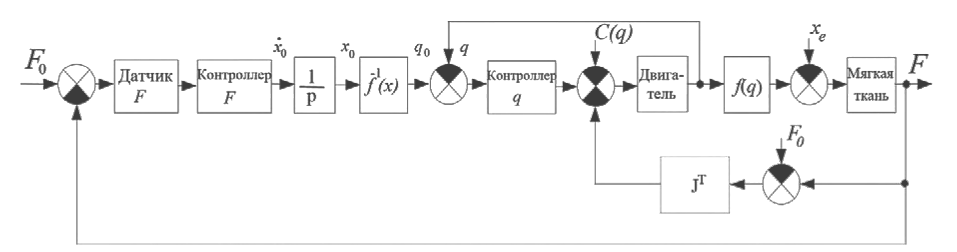
Рисунок 2. Функциональная схема робота для обучении силовых точек на траекториях: блоки f(q), f-1(х) – преобразователи координат в прямой и обратной кинематических задачах; хе – вектор рельефа мягкой ткани; Fo – вектор усилий (моментов), создаваемых рукой оператора; F – вектор усилий (моментов), создаваемых давлением мягкой ткани на инструмент робота, C(q) – вектор сил веса (моментов от сил веса).
Оператор, перемещая рукоятку, размещённую на конечном звене робота, деформирует мягкие ткани пациента. Робот в режиме податливого управления не препятствует движениям оператора.
Была разработана графическая часть интерфейса (рисунок 3) для настройки и проведения обучения мануальной демонстрацией пространственного необходимого перемещения при деформировании податливой среды.
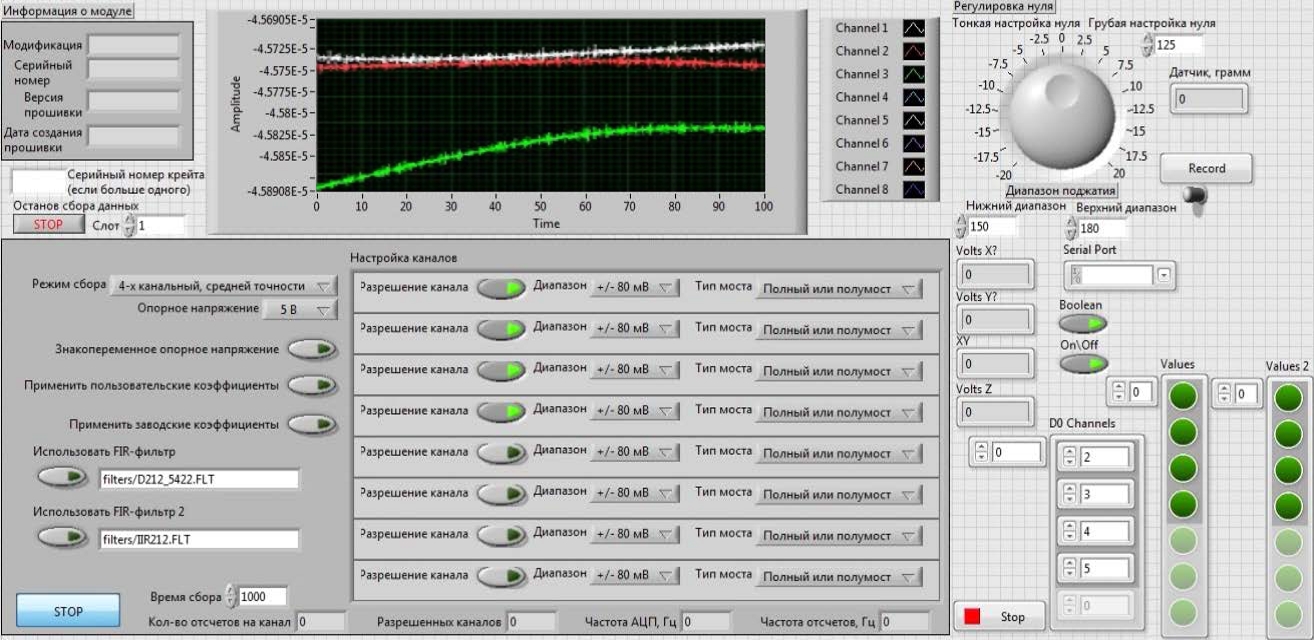
Рисунок 3. Лицевая панель виртуального графического интерфейса управления роботом.
Лицевая панель виртуального графического интерфейса (рисунок 3) включает следующие разделы настройки режимов работы биомехатронного модуля:
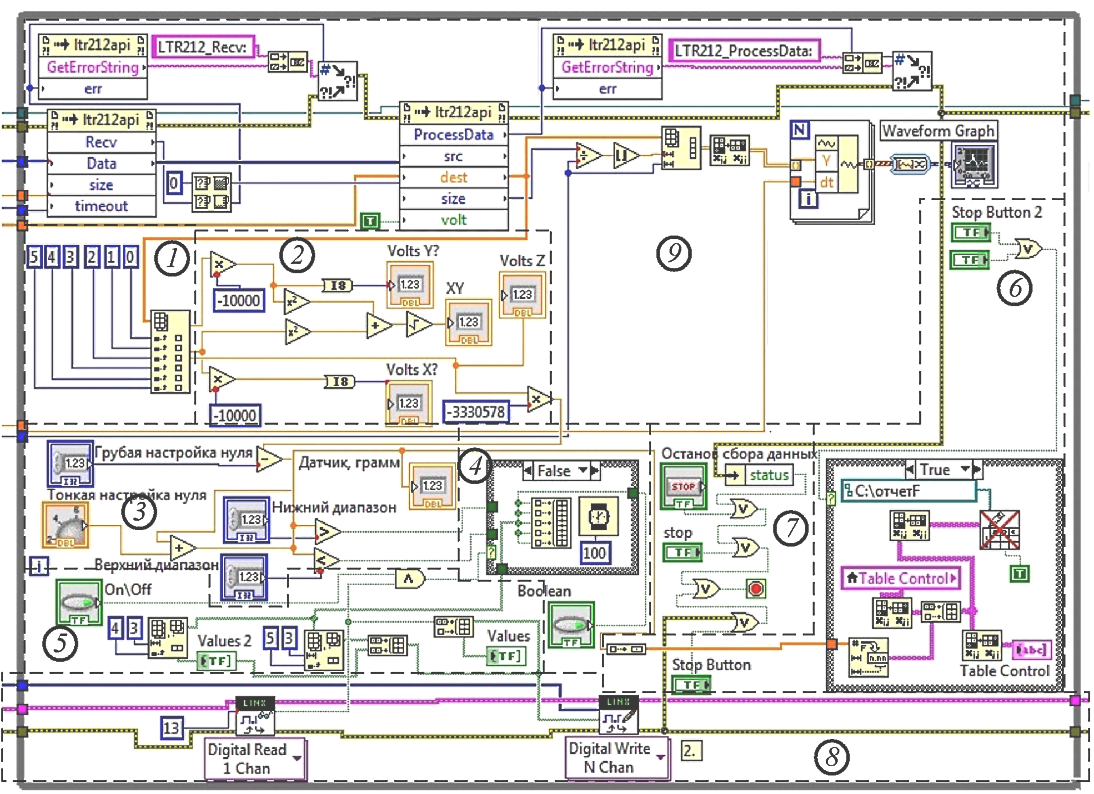
Рисунок 4. Блок-диаграмма графического интерфейса LabView управления манипуляционного робота.
Демонстрации манипуляционного робота РМ-01 показали реальность его применения для задач восстановительной медицины.
Научная работа, описанная в этой статье, была поддержана грантом президента РФ № МК-5826.2016.8.
Источник:
Архипов М.В., Головин В.Ф., Вжесневский Е.А. Человеко-машинный интерфейс манипуляционного робота // Экстремальная робототехника. - 2017. - Т. 1, № 1. - С. 110-119.
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон: +7 (495) 785-95-25
Письма и запросы: lcard@lcard.ru
Отдел продаж: sale@lcard.ru
Мы работаем с юридическими и физическими лицами, пожалуйста, прикладывайте реквизиты при оформлении заказа
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск