 +7 (495) 785-95-25
+7 (495) 785-95-25 lcard@lcard.ru
lcard@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
Для проверки работоспособности численного алгоритма нахождения положения и ориентации магнитного диполя, а также имитации работы системы контроля и управления магнитной капсулой эндоскопа специалистами Института проблем управления РАН и физического факультета МГУ была разработана структурная схема макета (рисунок 1) с применением модуля E14‑140‑M [1].
Схема содержит исследуемый объект (на рисунке условно показана модель кишечника с капсулой (М), источники магнитного поля (Н), три блока по 3 магниторезистивных датчика (3 х МРД), блок предварительной обработки сигналов с датчиков и персональный компьютер (РС) со специализированной программной системой (СПС). СПС управляет перемещением и ориентацией капсулы М за счет изменения положения источников магнитного поля Н, генерирует траекторию движения магнитной капсулы по виртуальной 3D-модели желудочно-кишечного тракта, определяет показания датчиков для положения и ориентации капсулы на каждом шаге траектории (прямая задача магнитной локации) и по этим показаниям вычисляет теоретические положение и ориентацию капсулы (обратная задача).
К настоящему времени разработано программное обеспечение СПС, созданы виртуальная 3D-модель части желудочно-кишечного тракта, векторная 3D-модель траектории движения магнитной капсулы, проведен сравнительный анализ векторной 3D-модели траектории движения с теоретическим расчетом траектории через показания датчиков. При этом геометрический размер области, в которой производился поиск капсулы: x∈[0; 0,5], y∈[0; 0,5], z∈[0; 0,25] (м). Среднее отклонение теоретических данных от исходных составило 6,2*10-3 м.
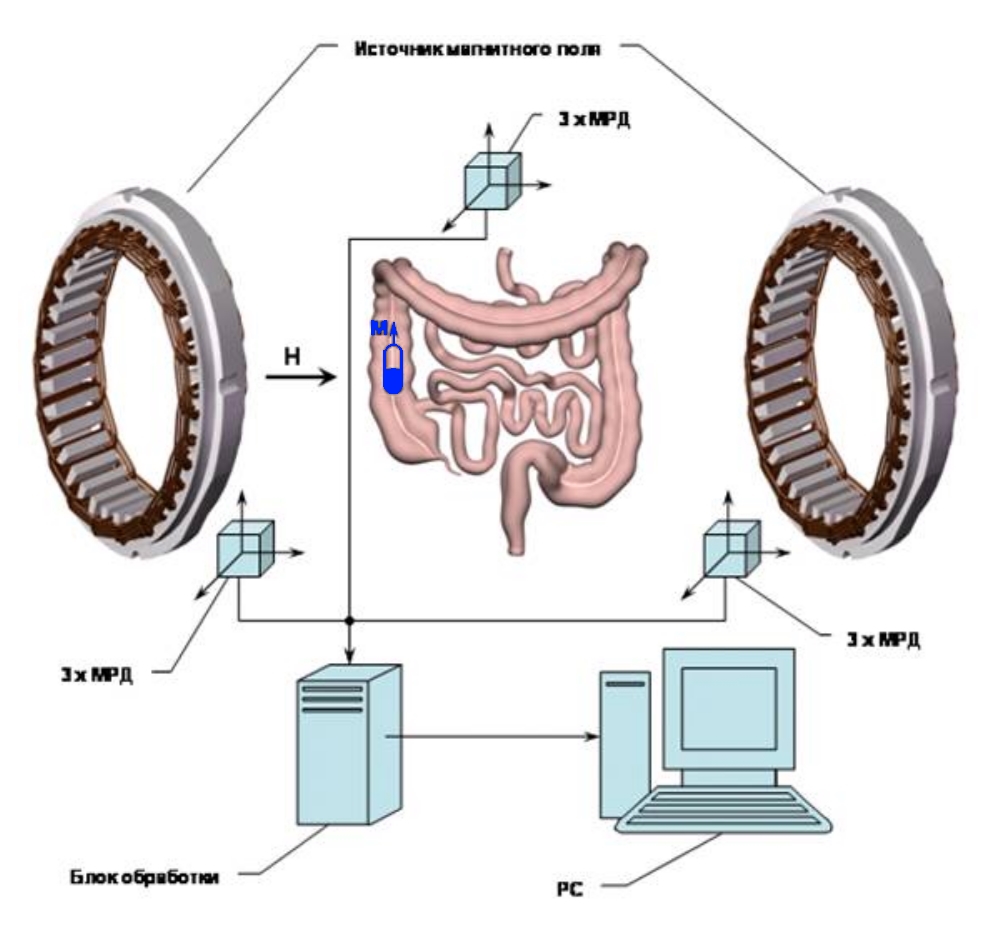
Рисунок 1. Структурная схема макета для исследования желудочно-кишечного тракта.
Измерительная часть макета состоит из трёх микросхем HMC‑2003 фирмы Honeywell. Микросхема содержит три АМР датчика магнитного поля, измеряющих магнитное поле по трёх осям, соединённых с прецизионными дифференциальными усилителями считывания. Рабочий диапазон датчиков составляет ±2 Э, пороговая чувствительность – 40 мкЭ. Авторами разработана схема импульсов set/reset для устранения влияния гистерезиса на результаты измерения магнитного поля и изготовлены три платы. Пара импульсов противоположной полярности амплитудой до нескольких ампер и длительностью 1‑2 мкс подаётся в проводник датчика во время измерения. Полученные с дифференциальных усилителей девять аналоговых сигналов считывания параллельно поступают на 32‑канальный модуль АЦП/ЦАП для создания измерительных систем Е14‑140‑М фирмы L‑Card и затем, в цифровом виде, на компьютер.
В работе показана возможность создания макета, определяющего пространственные и угловые координаты движущейся капсулы эндоскопа на основе набора из трёх троек магниторезистивных датчиков магнитного поля. Приведен численный алгоритм решения задачи магнитной локации и показана его работоспособность за счет имитации движения капсулы. Описана электронная часть макета.
Работа частично финансируется по проекту РФФИ № 09‑08‑00123_а «Разработка теории магнитной локации и управления движением магнитной капсулы эндоскопа и создание макета измерительно-управляющего комплекса с капсулой».
Источник:
Касаткин С.И., Муравьёв А.М., Поляков П.А., Поляков О.П., Артамонов Е.И., Балабанов А.В., Ромакин В.А., Савельев К.А. Система магнитной локации и управления капсулой эндоскопа: [Электронный ресурс] // Институт проблем управления им. В.А. Трапезникова РАН. – М. – URL: http://lab18.ipu.ru/projects/conf2010/1/16.htm. (Дата обращения: 27.12.18).
Разработчики:
С.И. Касаткин, А.М. Муравьёв, Е.И. Артамонов, А.В. Балабанов, В.А. Ромакин, К.А. Савельев (ИПУ РАН, г. Москва), П.А. Поляков, О.П. Поляков (Физический факультет МГУ).
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон: +7 (495) 785-95-25
Письма и запросы: lcard@lcard.ru
Отдел продаж: sale@lcard.ru
Мы работаем с юридическими и физическими лицами, пожалуйста, прикладывайте реквизиты при оформлении заказа
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск