 +7 (495) 785-95-25
+7 (495) 785-95-25 lcard@lcard.ru
lcard@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
Модуль E14‑140 был применён в автоматизированном измерительном комплексе экспериментальной модели автопоезда-контейнеровоза для проведения экспериментов по проверке параметров управляемости и устойчивости движения автопоезда-контейнеровоза [1].
Одним из конструктивных решений, при котором может быть полностью использованы потенциальные возможности автопоезда, является применение шасси автомобиля-тягача с удлиненной рамой, на которой устанавливается 20‑футовый контейнер и седельно-сцепное устройство. Для проведения экспериментальных исследований в Луцком национальном техническом университете была создана модель такого автопоезда (рисунок 1). В автомобиле КамАЗ-53215 была удлинена рама, для того чтобы вынести точку сцепки за пределы центра масс задней колесной тележки.

Рисунок 1. Модель автопоезда-контейнеровоза.
Для проведения экспериментальных исследований был создан комплекс оборудования, состоящий из ноутбука, АЦП E14‑140, акселерометров Freescale Semiconductor MMA7260QR2, датчика перемещения подвески WABCO № 441 050 100 0 (работает по принципу угла поворота), датчика угла поворота управляемых колес и датчика угла сборки звеньев автопоезда, функции которых выполняет датчик WABCO № 441 050 100 0.
Датчики были установлены в характерных точках автомобиля-тягача и полуприцепа (рисунки 2‑5).
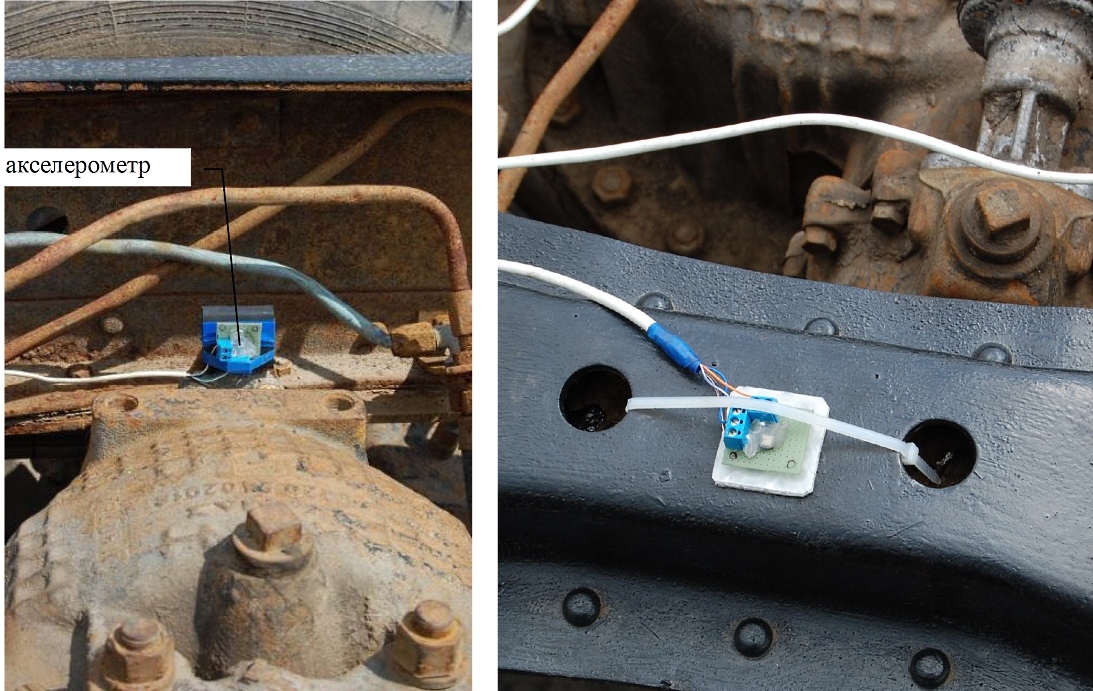
Рисунок 2. Установка акселерометра.
Датчики перемещения были закреплены на раме.
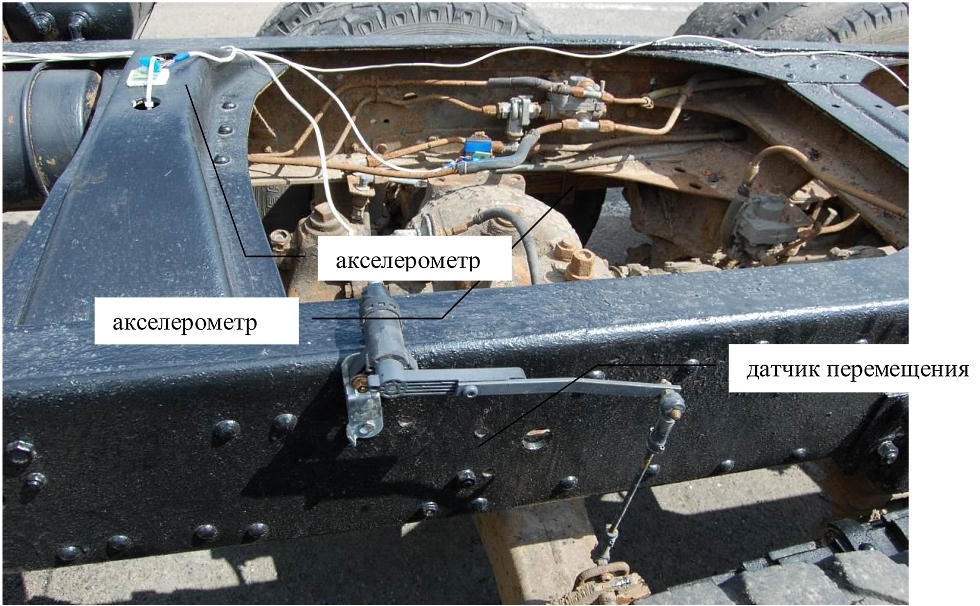
Рисунок 3. Датчик перемещения и акселерометры закреплены на раме автомобиля.
Аналогичные датчики были установлены на передней оси автомобиля-тягача и полуприцепе-контейнеровозе.

Рисунок 4. Датчик перемещения и акселерометры закреплены на передней балке автомобиля.
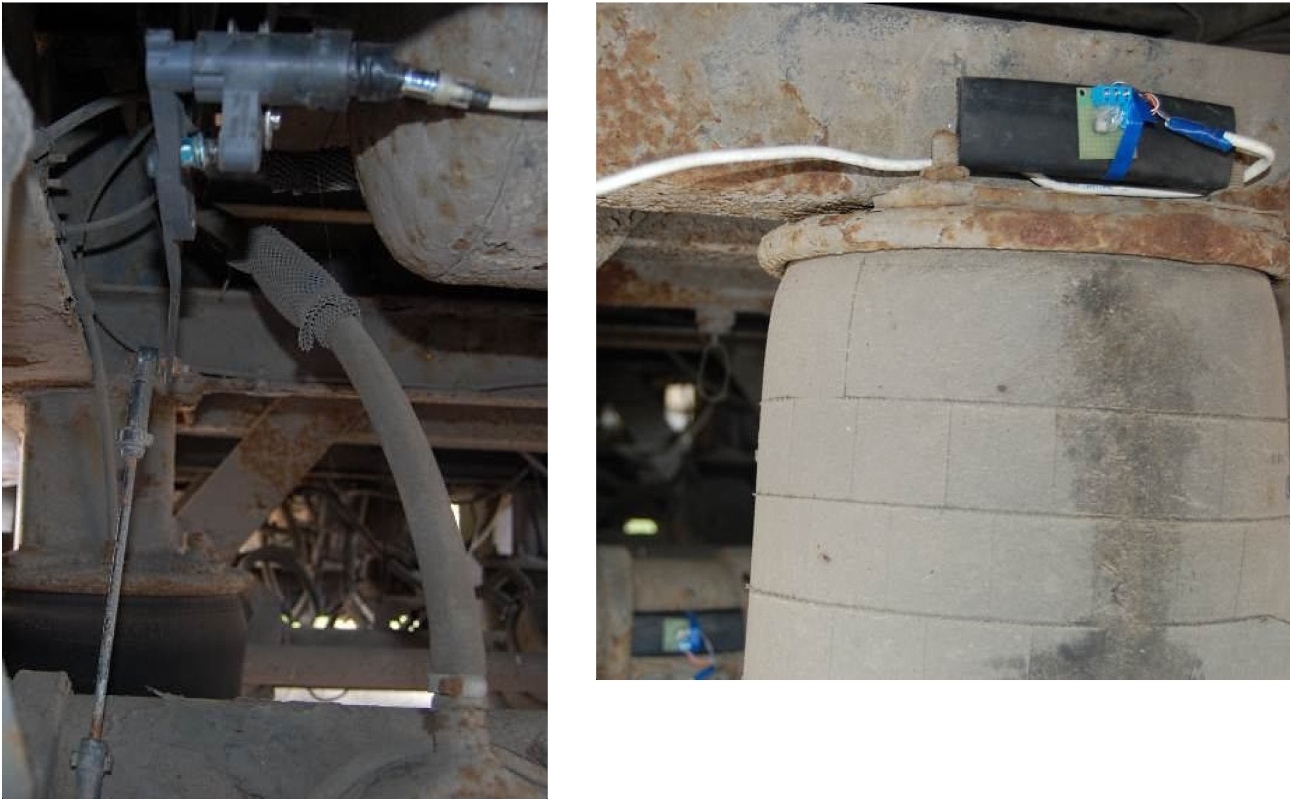
Рисунок 5. Датчик перемещения и акселерометры закреплены на полуприцепе.
Программная часть измерительного комплекса состоит из программы PowerGraph.
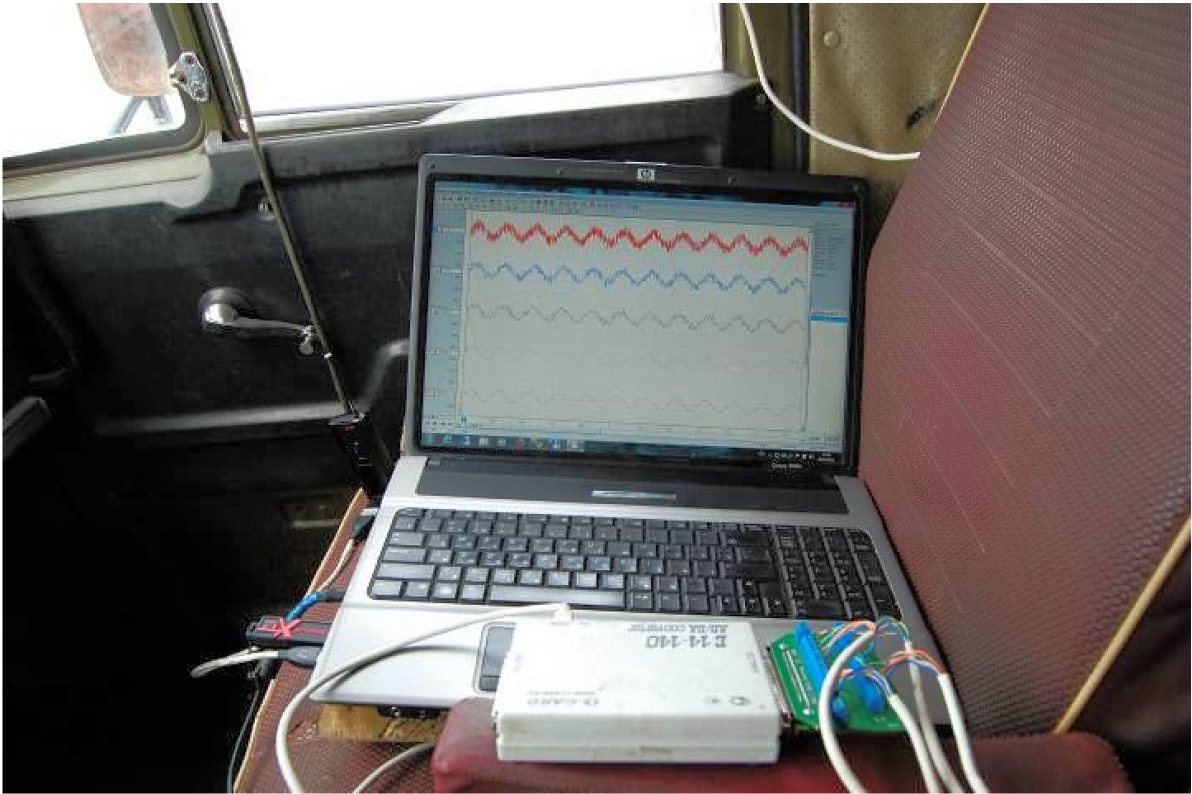
Рисунок 6. Автоматизированный измерительный комплекс.
Разработанный автоматизированный комплекс позволяет провести экспериментальные исследования автопоезда-контейнеровоза и определить показатели устойчивости и управляемости. В статье [2] приведено подробное описание проведённых экспериментов по определению кинематических параметров и отклонений траекторий звеньев при установившемся круговом движении автопоезда и по определению параметров движения автопоезда в случае смены полосы движения. Дорожные испытания проводились на ровной асфальтобетонной площадке размером 100 х 120 м, которая расположена на полигоне Луцкого НТУ и ровной горизонтальной асфальтированной дороге Луцк – Ровно (31...35 км).

Рисунок 7. Виды испытаний автопоезда-контейнеровоза для проведения исследований его маневренности.
Источники:
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон: +7 (495) 785-95-25
Письма и запросы: lcard@lcard.ru
Отдел продаж: sale@lcard.ru
Мы работаем с юридическими и физическими лицами, пожалуйста, прикладывайте реквизиты при оформлении заказа
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск