 +7 (495) 785-95-25
+7 (495) 785-95-25 lcard@lcard.ru
lcard@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
В работе [1] способность крыла миниатюрного жука Paratuposa placentis генерировать аэродинамическую силу оценивается с использованием комбинированного экспериментального и численного подхода. Крыло имеет своеобразную форму, напоминающую птичье перо, часто встречается у мельчайших насекомых. Коэффициенты аэродинамической силы определяются из эксперимента по измерению силы в динамическом масштабе с вращающимися щетинными и мембранными моделями крыльев в баке с глицерином. Впоследствии они используются в качестве данных численной проверки для вычислительного гидродинамического моделирования.
Цели данного исследования заключаются в реализации и перекрестной проверке экспериментальной установки и ПО численного моделирования для изучения аэродинамики крыльев из щетинок биореалистичной формы. Авторы построили модель в динамическом масштабе, которая точно соответствует форме пернатого жука Paratuposa placentis с точки зрения размера и ориентации щетинок, а также формы центральной мембраны (лопасти).
Крыло смоделировано по образцу одного из самых мелких жуков Paratuposa placentis Deane. Взрослые особи были собраны во Вьетнаме в национальном парке Кат Тиен. Внешняя морфология одного из образцов представлена на рисунке 1а.
Масштабированная механическая модель (рисунок 1b) и компьютерная модель (рисунок 1c) имеют сходные основные морфологические признаки, такие как количество длинных щетинок, их ориентация, положение на лопасти крыла и форма контура лопасти крыла.
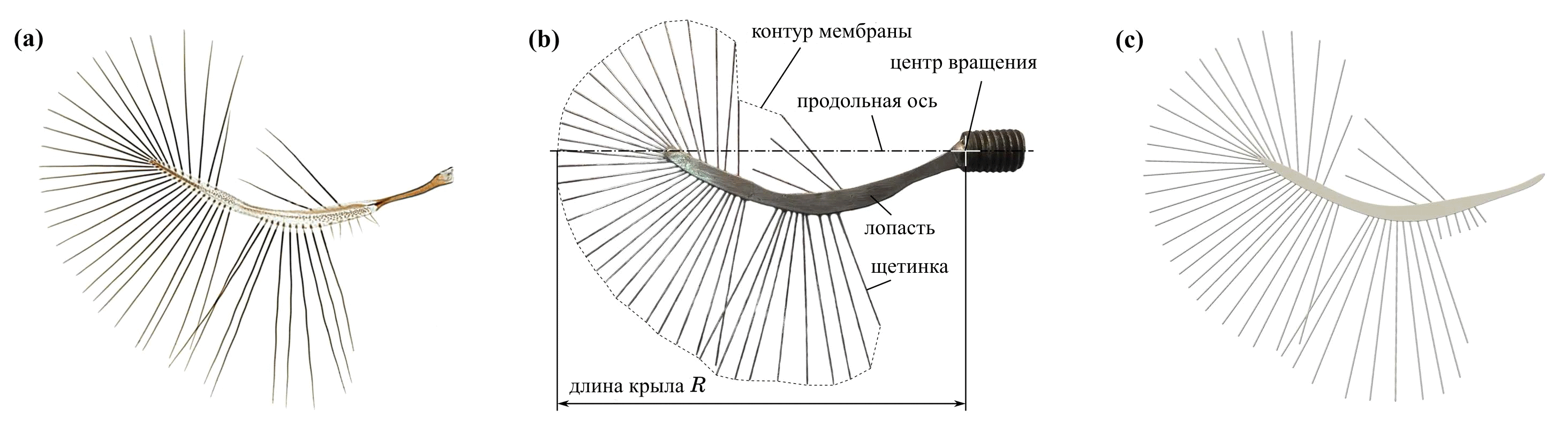
Рисунок 1. Крыло P. placentis – a. Модель крыла с механическими щетинками, где пунктирная линия показывает эквивалентный контур мембраны – b. Компьютерная визуализация модели крыла, используемой в численном моделировании – c.
Механическая модель крыла в динамическом масштабе (рисунок 1b) установлена на опорном держателе, как показано на рисунке 2а. Регулируемое крепление позволяет установить геометрический угол атаки на фиксированное значение от 0º до 90º. Держатель опоры может вращаться вокруг вертикальной оси, проходящей через основание крыла, а вращение осуществляется с помощью шагового двигателя, приводного ремня. Шаговый двигатель управляется с помощью драйвера TB6560 V2, подключенного к контроллеру Arduino Uno R3, который обеспечивает постепенное постоянное ускорение в начале вращения.
Модель крыла полностью погружена в водно-глицериновый раствор, являющийся ньютоновской жидкостью (рисунок 2b), где поддерживается постоянная температура для обеспечения заданного значения кинематической вязкости.
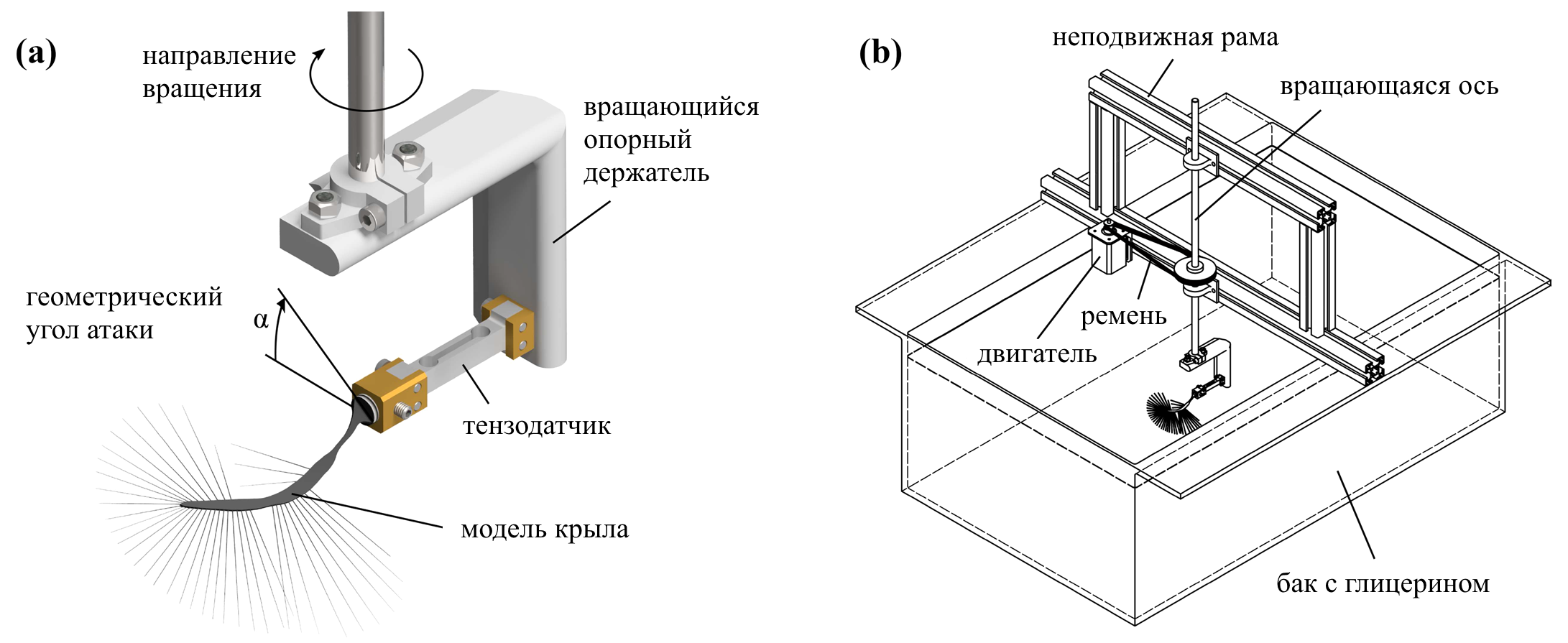
Рисунок 2. Экспериментальная установка с динамическим масштабированием. Увеличенная модель крыла на вращающейся установке – a. Модель, погруженная в бак с глицерином – b.
Гидродинамические силы, действующие на модель, измеряются с помощью тензодатчика компании Beijing XNQ Electric Co. Частота дискретизации измерения силы составляет 1000 Гц. Обработка сигнала осуществляется с помощью усилителя, изготовленного по индивидуальному заказу, фильтра нижних частот на резисторно-емкостной схеме и модуля АЦП E20‑10. Для шумоподавления также применяется низкочастотная биквадратная цифровая фильтрация на частоте 5 Гц.
В данном исследовании было установлено, что в рассмотренных биологически значимых режимах щетинистое крыло функционирует как негерметичная лопатка менее чем на 50 % и создает от 66 до 96 % силы аэродинамического сопротивления эквивалентного мембранного крыла. Расхождение увеличивается с увеличением числа Рейнольдса. Показано, что примерно половина аэродинамической нормальной силы, действующей на щетинистое крыло, возникает из-за вязкого напряжения сдвига. В качестве меры аэродинамической эффективности предлагается коэффициент эффективности гребли.
Статья написана исследователями из университетов и научных центров Японии, России, Германии и Вьетнама:
Источник:
Kolomenskiy, D., Farisenkov, S., Engels, T. et al. Aerodynamic performance of a bristled wing of a very small insect. Exp Fluids 61, 194 (2020). https://doi.org/10.1007/s00348-020-03027-0
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон: +7 (495) 785-95-25
Письма и запросы: lcard@lcard.ru
Отдел продаж: sale@lcard.ru
Мы работаем с юридическими и физическими лицами, пожалуйста, прикладывайте реквизиты при оформлении заказа
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск