 +7 (495) 785-95-25
+7 (495) 785-95-25 lcard@lcard.ru
lcard@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
В статье [1] обсуждается разработанный авторами новый метод обнаружения заглубленных металлических объектов, который сочетает в себе два основных подповерхностных метода зондирования: один основан на изменениях параметров электромагнитного поля, вызванных внутренним или поверхностным сопротивлением среды под воздействием распространяющегося магнитного поля; а второй основан на изменениях входного импеданса приемника, вызванных электромагнитными свойствами исследуемой среды.
Предлагаемый метод использует три инструментальных канала: два первичных канала исходят от ферритовой магнитной антенны (приемника), где первый канал используется для измерения текущей амплитуды напряжения активной составляющей входного сигнала, второй канал измеряет текущую амплитуду напряжения реактивной составляющей входного сигнала, а дополнительный (вторичный) канал от излучающей рамочной антенны (передатчика) измеряет текущую амплитуду возбуждающего тока.
Настоящая статья является развитием ранее опубликованной статьи [2] по данной тематике.
Блок-схема металлоискателя показана на рисунке 1.

Рисунок 1. Схема металлоискателя: 1 – измерительный зонд; 2 – рамочная антенна; 3 – приемная катушка; 4 – ферритовый сердечник; 5 – инструментальный усилитель; 6' и 6" – буферные усилители; 7 – генератор, вырабатывающий синусоидальное напряжение на звуковых частотах; 8 – генератор квадратурного опорного напряжения; 9' и 9" – синхронные детекторы (СД); 10' и 10" – блоки АЦП; 11 – вычислительный блок; 12 – измеритель тока; 13 – блок АЦП; 14 – устройство ввода данных; 15 – индикатор; RS – измерительный шунт. Элементы (3) и (4) зонда (1) образуют ферритовый приёмник. Катушка передатчика FT (2) ортогональна приемной катушке (3) для достижения требуемой геометрической компенсации первичного поля приёмной катушки FR.
Чтобы протестировать предложенный комбинированный метод индукционного зондирования, исследовательская группа разработала индукционный зонд, который содержал катушки FR и FT.
На рисунке 2 показан пилотный вариант этого зонда.
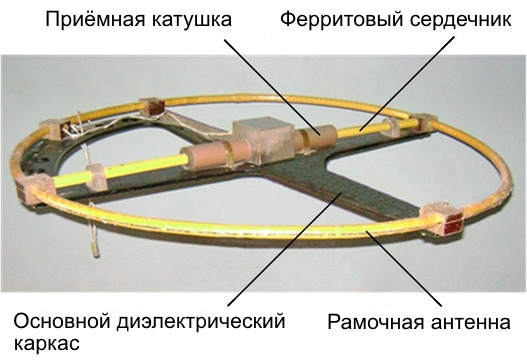
Рисунок 2. Пилотный индукционный зонд: вариант конструкции.
Для первичной и вторичной обработки сигналов исследовательская группа использовала специальный электронный модуль, функциональные блоки которого основывались на прецизионных операционных усилителях, а цифроаналоговое преобразование и дальнейшая цифровая передача сигналов и регистрация обеспечивались системой сбора данных E‑502. Использовался ноутбук и ПО, разработанное для запуска инструментального алгоритма и визуализации процедуры поиска.
На рисунке 3 показаны некоторые результаты тестирования обнаружения заглубленного в среду металла, где h – глубина, S – площадь поперечного сечения основных проводников (медь – Cu и алюминий – Al). 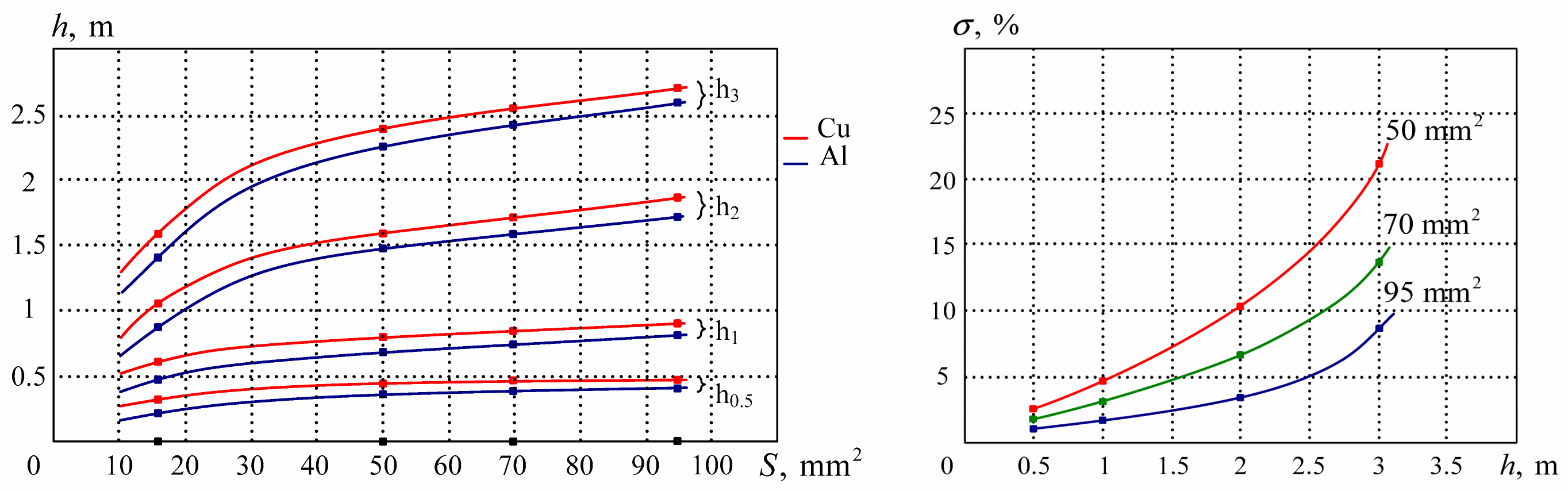
Рисунок 3. Измерения на разной глубине – слева; распределение ошибок определения относительной глубины – справа.
Авторы отмечают, что благодаря обеспечиваемой избыточности данных использованный метод измерения эффективно улучшает характеристики подземного зондирования в целом. Реализация вычислительных процедур для предложенного двойного метода поможет обнаруживать и идентифицировать подземные объекты по их удельной электропроводности и магнитной проницаемости, а также определять их местонахождение по глубине. Все это повышает производительность и информативность предлагаемого комбинированного метода обнаружения залегающего объекта, а также расширяет спектр возможных приложений. Экспериментальные исследования подтверждают эффективность и работоспособность разработанного комбинированного метода поиска скрытых металлических предметов.
Коллектив авторов данной статьи представляет четыре учебных заведения Кыргызстана и России:
Источники:
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон: +7 (495) 785-95-25
Письма и запросы: lcard@lcard.ru
Отдел продаж: sale@lcard.ru
Мы работаем с юридическими и физическими лицами, пожалуйста, прикладывайте реквизиты при оформлении заказа
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск