 +7 (495) 785-95-25
+7 (495) 785-95-25 lcard@lcard.ru
lcard@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
Пример применения модуля L‑502 со встроенным процессором Blackfin в замкнутой системе управления с обратной связью, с пользовательским алгоритмом работы, заложенным в программу Blackfin, мы находим в диссертационной работе [1] из области биофизики. Цель работы – разработать новый класс экспериментальных и математических моделей, имитирующих неоднородность механических свойств миокарда, и определить вклад локальной неоднородности геометрических и механических свойств изолированного препарата миокарда в его результирующий вязкоупругий отклик.
В основу разработанной математической модели лег одиночный базовый блок, рисунок 1.
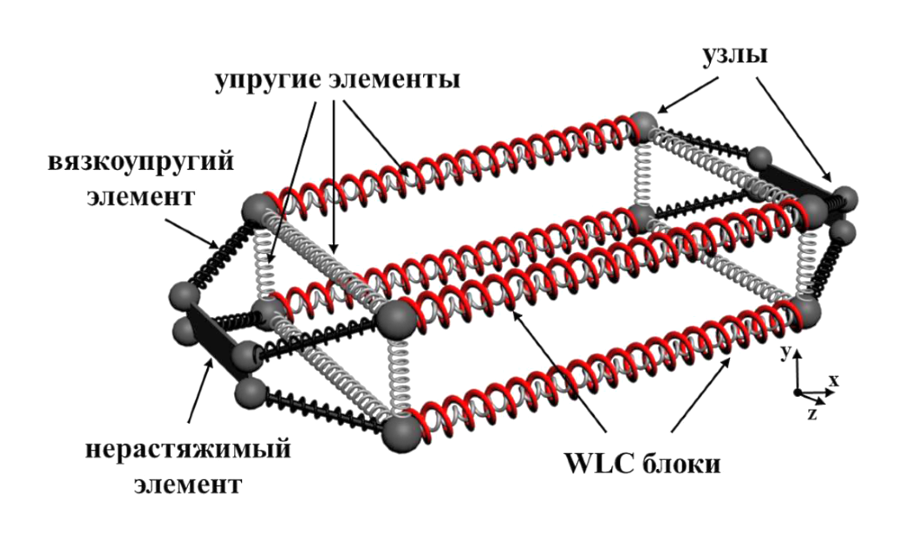
Рисунок 1. Структурная схема 3D модели морфофункциональной единицы миокарда, состоящая из продольных и поперечных упругих (светло-серые), наклонных вязкоупругих (темно-серые) элементов и WLC блоков (красные); серые сферы – узлы модели (упругие элементы отображены в виде пружин, вязкие – в виде демпферов).
Биомеханические испытания изолированных препаратов миокарда проведены на уникальном программно-аппаратном комплексе, разработанном в лаборатории биологической подвижности УрО РАН. На рисунке 2 представлена схема комплекса.
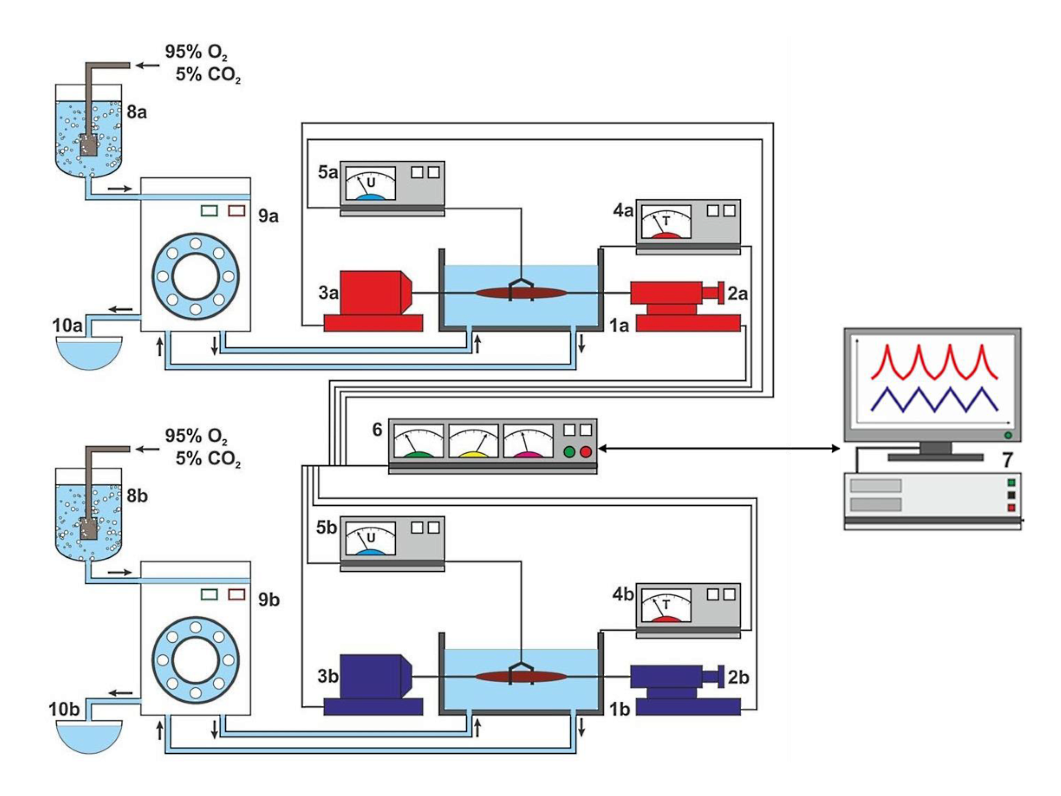
Рисунок 2. Схема экспериментального двухканального (a и b) комплекса: 1 – ванночка для изолированного препарата миокарда; 2 – датчик силы; 3 – сервомотор длины; 4 – термостат; 5 – электростимулятор; 6 – блок управления; 7 – ПК с АЦП/ЦАП L‑502; 8 – камера для барбатируемых растворов; 9 – перистальтический насос; 10 – резервуар для отработанного раствора. Стрелками указано направление циркуляции раствора.
Линейный сервомотор с диапазоном изменения длины ±600 мкм сконструирован на основе электродинамического громкоговорителя 25ГДН‑1 и включает в себя подвижную электрическую катушку, систему постоянных магнитов, фотосветодиодный датчик перемещения, шток и устройство управления. Устройство управления состоит из усилителей и интегро-дифференциаторов входного сигнала и сигнала обратной связи, сумматора и усилителя мощности и обеспечивает глубокую обратную связь с датчика перемещения на катушку.
Блок измерения силы со штоком массой около 1 грамма размещен на столике с микроподачей. Датчик силы изготовлен с использованием чувствительного элемента С‑03 на базе кремниевого тензосопротивления, напыленного на лейкосапфировую подложку. Ток питания измерительного моста стабилизирован.
Стимулятор генерирует электрические раздражающие импульсы прямоугольной формы. Сердечные мышцы стимулируют через неполяризующиеся угольные электроды большой площади, расположенные вдоль препарата, чтобы обеспечить одновременное возбуждение всех клеток и избежать тем самым временную задержку при распространении импульса по препарату.
Система жизнеобеспечения: мышцу, выделенную из сердца крысы, помещали в ванночку, которую перфузировали раствором через перистальтический насос (MasterfLex L/S, USA), который позволяет регулировать скорость протока аэрируемых растворов через ванночку.
В качестве системы ввода-вывода аналоговых и цифровых сигналов программно-экспериментального комплекса выбран модуль L‑Card L‑502, в котором обработка данных и формирование управляющих сигналов происходит в режиме «реального времени» под управлением процессора Blackfin.
ПО экспериментального комплекса состоит из двух программ, разработанных в лаборатории биологической подвижности ИИФ УрО РАН: программная прошивка и пользовательское приложение. Первая загружается в модуль и работает в режиме «реального времени». Вторая содержит графический интерфейс и предоставляет возможность управлять работой прошивки с помощью передачи в неё команд в виде массивов данных и работает как обычная программа под управлением Windows или Unix. На рисунке 3 представлен общий графический интерфейс пользовательского приложения.
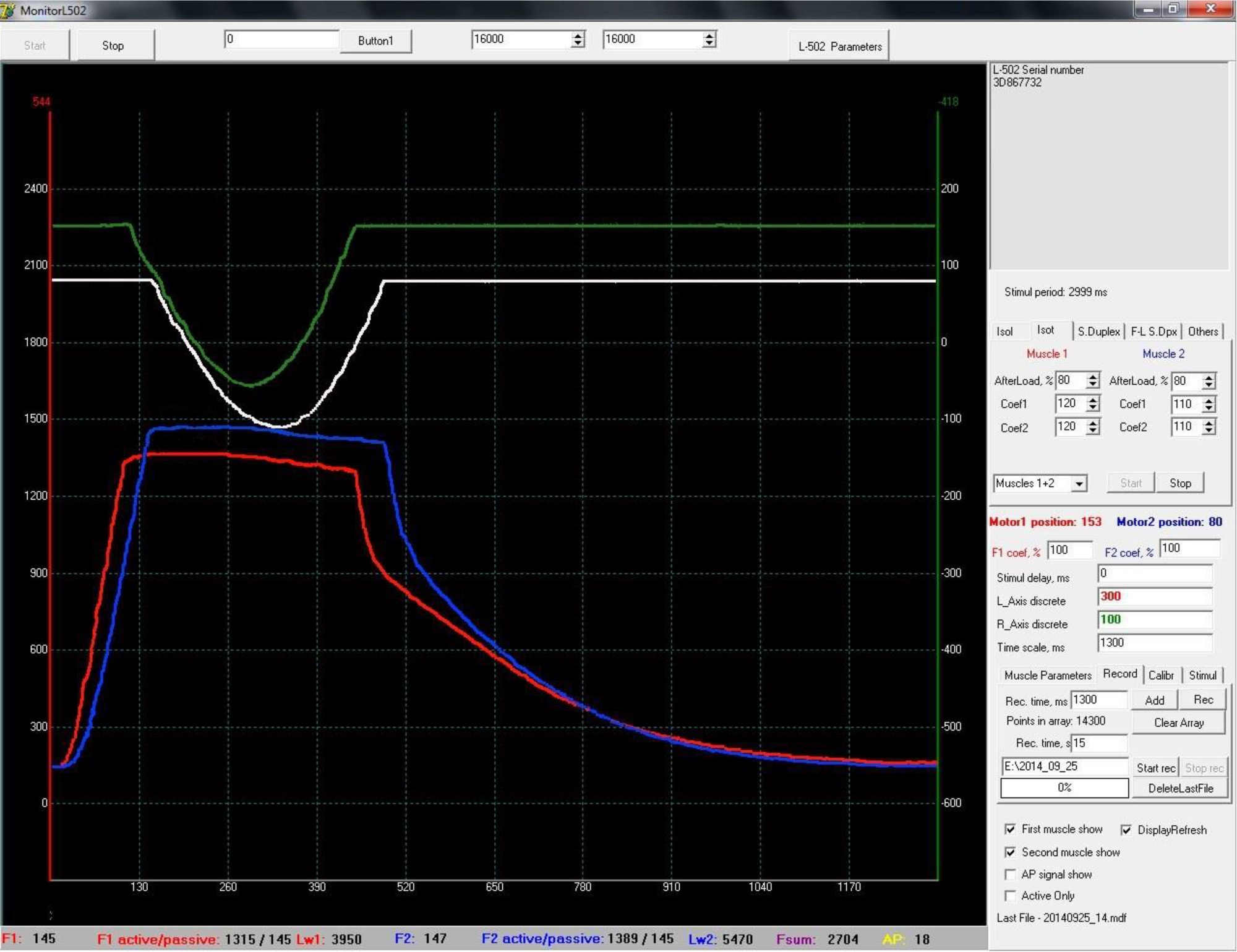
Рисунок 3. Вид интерфейса пользовательского приложения. Показаны траектории изменения длины (две верхние кривые – ось ординат справа, цена деления – 100 мкм) и силы (две нижние кривые – ось ординат слева, цена деления – 300 мг силы) двух папиллярных мышц крысы в ходе изотонических сокращений (шкала абсцисс, цена деления – 130 мс).
На рисунке 4 представлена блок-схема взаимодействия программы графического интерфейса с программой платы ввода/вывода в течение одного такта управления (получение, обработка информации и выдача командного сигнала за 100 мкс).
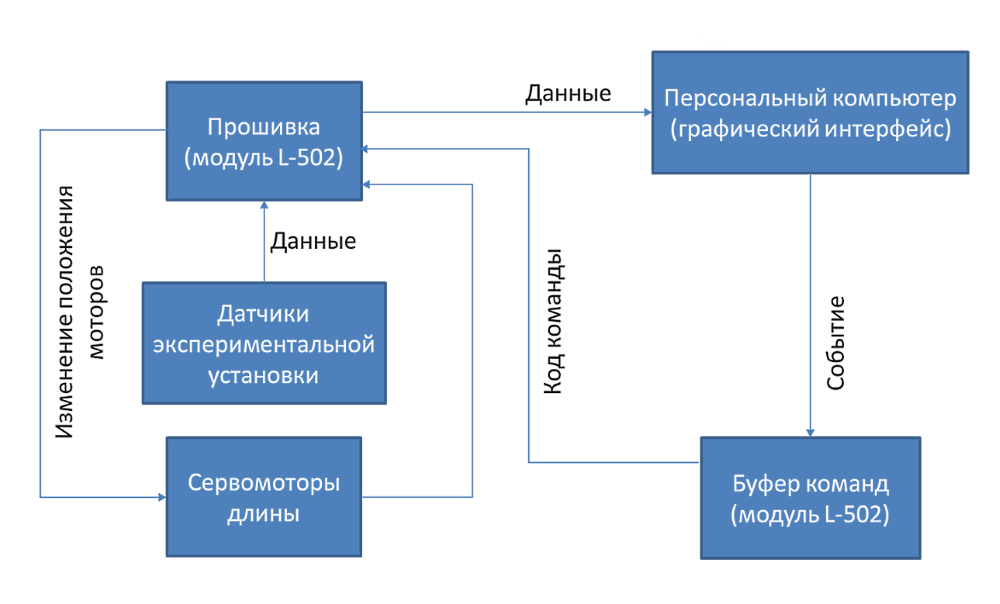
Рисунок 4. Схема работы программы платы вводы/вывода (на схеме – «прошивка») и её взаимодействие с программой графического интерфейса в течение одного такта управления.
Пользовательское приложение экспериментального комплекса было реализовано с помощью Microsoft Visual С++, Borland C++ Builder, Borland Delphi, LabView и др. Прошивка L‑502 может быть собрана как в среде VisualDSP, так и с помощью свободно распространяемого компилятора GCC (с использованием GNU Toolchain для BlackFin). Встроенное ПО L‑502 содержит специально разработанные алгоритмы управления сервомоторами длины.
Приводим выводы, имеющие отношение к экспериментальной части диссертационной работы:
Источник:
Смолюк А.Т. Неоднородность вязкоупругих свойств миокарда. Модель и эксперимент: диссертация на соискание ученой степени кандидата физико-математических наук. – Екатеринбург. – 2017. – 149 с.
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон: +7 (495) 785-95-25
Письма и запросы: lcard@lcard.ru
Отдел продаж: sale@lcard.ru
Мы работаем с юридическими и физическими лицами, пожалуйста, прикладывайте реквизиты при оформлении заказа
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск