 +7 (495) 785-95-25
+7 (495) 785-95-25 lcard@lcard.ru
lcard@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
В диссертационной работе [1] описывается применение модуля E14‑440 АЦП/ЦАП в контуре обратной связи установки, предназначенной для исследования трибологических свойств материалов. Конструкция установки представлена на рисунке 1.
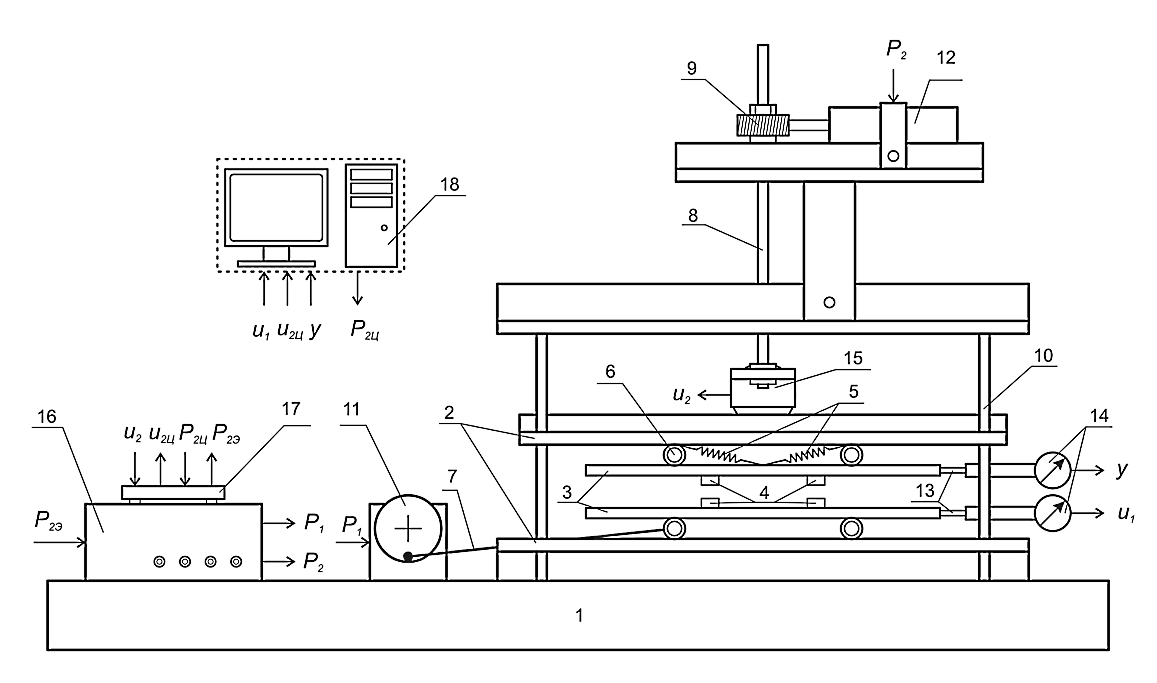
Рисунок 1. Установка для исследования динамических характеристик трибопар: 1 – основание; 2 – направляющие для подвижных платформ; 3 – образцы; 4 – контробразцы; 5 – упругий подвес; 6 – катки; 7 – кривошипно-шатунный механизм; 8 – винтовой домкрат; 9 – червячная передача; 10 – стойка; 11 – электропривод; 12 – реверсивный электродвигатель; 13 – щупы; 14 – датчики перемещения; 15 – динамометр; 16 – блок управления; 17 – модуль E14‑440 АЦП/ЦАП и цифрового ввода/вывода; 18 – компьютер; Р1, P2 – сигналы управления; P2Ц – цифровой сигнал управления; P2Э – электрический сигнал; u1, y - координаты платформ; u2 – значение силы нагружения; u2Ц – цифровой вид электрического сигнала.
Измерительный блок предназначен для снятия механических характеристик и состоит из щупов 13, которые передают сигнал от платформ на датчики перемещения 14, закрепленные на стойке 10, а также динамометра 15.
Информационно-управляющий блок позволяет управлять электроприводами установки, а также преобразовывать и обрабатывать информацию, поступающую от компонентов измерительного блока. Он состоит из блока управления установкой 16, модуля E14‑440 АЦП/ЦАП и цифрового ввода/вывода 17, а также компьютера 18 со специализированным ПО.
Сигналы с оптико-механических датчиков перемещения, присоединенных к верхней и нижней платформам, и динамометра (силоизмерительного датчика на основе механотрона 6МХ1С), установленного между домкратом и верхней направляющей, через промежуточные преобразователи поступают на компьютер со специальным программным обеспечением. Оно позволяет как наблюдать в реальном времени за сигналами, так и записывать в файлы для дальнейшей обработки их в различных прикладных программах, в том числе средствами пакета MATLAB. Во время работы установки у оператора отсутствует возможность управлять приводом нагружения, это осуществляется автоматически с помощью контура обратной связи (рисунок 2).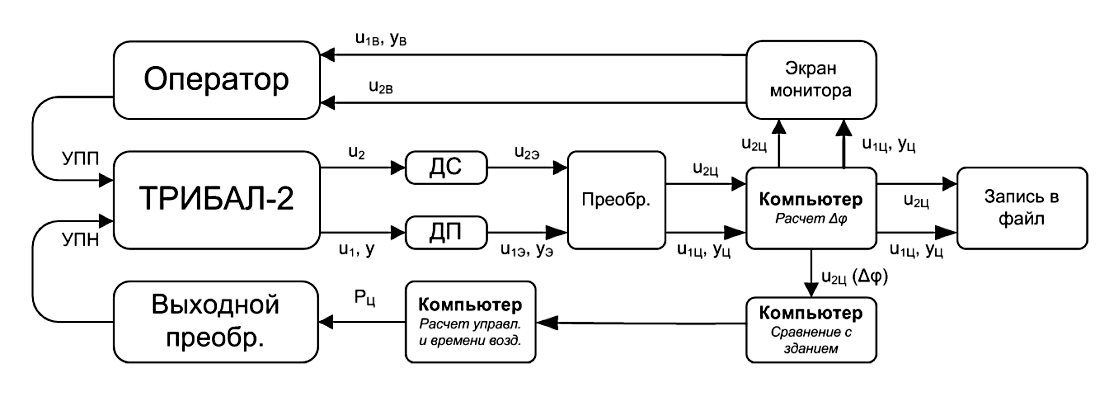
Рисунок 2. Автоматическое управление нагружением по значению силы нагружения или разности фаз: УПП – управление приводом перемещения нижней платформы; УПН – управление приводом нагружения; ДС – датчик силы; ДП – датчик перемещения; u1, y – координаты платформ (u1Э , yЭ – преобразованные в электрический сигнал; u1ц, yц – в цифровой форме); u2 – значение силы нагружения (u2Э – преобразованное в электрический сигнал, u2Ц – в цифровой форме).
Приводим некоторые выводы о результатах работы:
Источник:
Ткачёв А.Л. Трибометрическая установка с обратной связью в системе нагружения для исследования переходных процессов в режиме реального времени: автореферат диссертации на соискание ученой степени кандидата технических наук. – СПб. – 2010. – 14 с.
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон: +7 (495) 785-95-25
Письма и запросы: lcard@lcard.ru
Отдел продаж: sale@lcard.ru
Мы работаем с юридическими и физическими лицами, пожалуйста, прикладывайте реквизиты при оформлении заказа
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск