 +7 (495) 785-95-25
+7 (495) 785-95-25 lcard@lcard.ru
lcard@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
Эта тема продолжает серию публикаций о применении изделий L‑Card в учебном оборудовании на примере интеграции модуля АЦП-ЦАП E20-10 в экспериментальный лабораторный стенд.
Целью данной лабораторной работы Донского государственного технического университета [1] является экспериментальное определение параметров быстродействия и точности позиционирования пневмопривода линейного перемещения руки-схвата робота в заданном рабочем цикле. Проведение таких исследований позволяет спланировать и осуществить многофакторный эксперимент для определения оптимальных параметров настройки пневмопривода.
Позиционный пневмопривод (рисунок 1) применяется в технологическом оборудовании для обеспечения жестких, редко переналаживаемых рабочих циклов, что характерно для серийного и массового производства. Основное преимущество таких приводов – простота и экономичность, недостаток – необходимость переналадки, невысокая точность позиционирования.
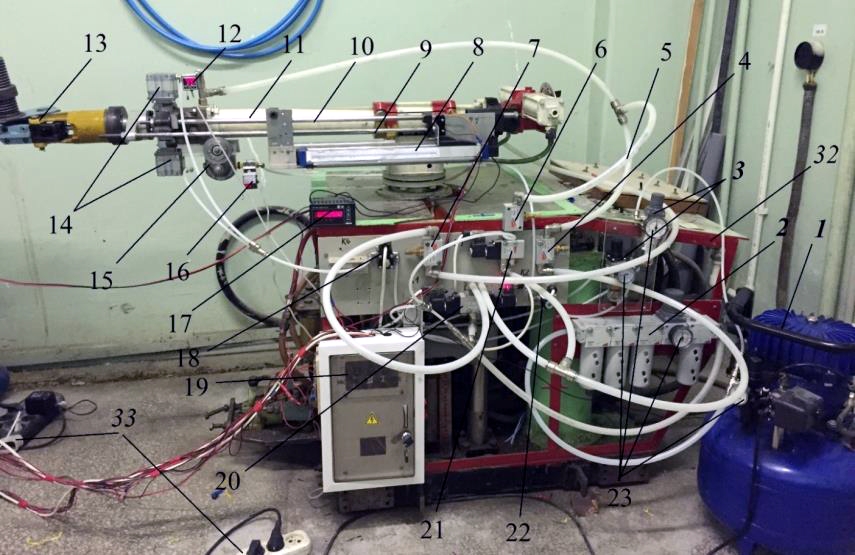
Рисунок 1. Стенд-модель для исследования автоматизированного позиционного пневмопривода: 1 – компрессор; 2 – блок заготовки воздуха; 3 – регуляторы давления; 4, 6, 7 – дроссели с обратным клапаном; 5 – труба TRN14/12; 8 – датчик перемещения; 9 – зубчатая рейка; 10 – направляющая рейка; 11 – силовой пневмоцилиндр; 12, 16 – датчики давления; 13 – масса; 14 – тормозные пневмоцилиндры; 15 – многопараметрический пневмомеханический датчик; 17 – счётчик импульсов; 18, 20, 21, 22 – пневматические распределители; 19 – электрический шкаф; 23 – манометры; 33 – электрические усилители.
Высокое быстродействие пневмопривода обуславливает проблему его точности останова L в заданной координате (В). Рассматривая траекторию перемещения O‑A‑C‑B (рисунок 2), можно разделить его движение на участки разгона и торможения с выходом непосредственно в заданную точку. При этом в автоматизированных программных пневмоприводах используют датчики положений, расположенные по ходу перемещения выходного звена в местах переключения скорости (A‑C‑D).

Рисунок 2. Типовые траектории движения целевого механизма: 1 – обобщенная траектория движения исполнительных механизмов; 2 – оптимальная траектория движения; 3 – траектория движения исполнительных механизмов назад.
Специальное стендовое оборудование помогло решить следующие задачи:
На рисунке 3 представлен общий вид контрольно-измерительного комплекса и управляющих устройств позиционного пневмомеханического привода, позволяющих смоделировать позиционный аппаратно-программный преобразователь (АПП). Комплекс предназначен для визуализации значений основных кинематических, гидравлических и силовых параметров и задания исходных данных эксперимента.
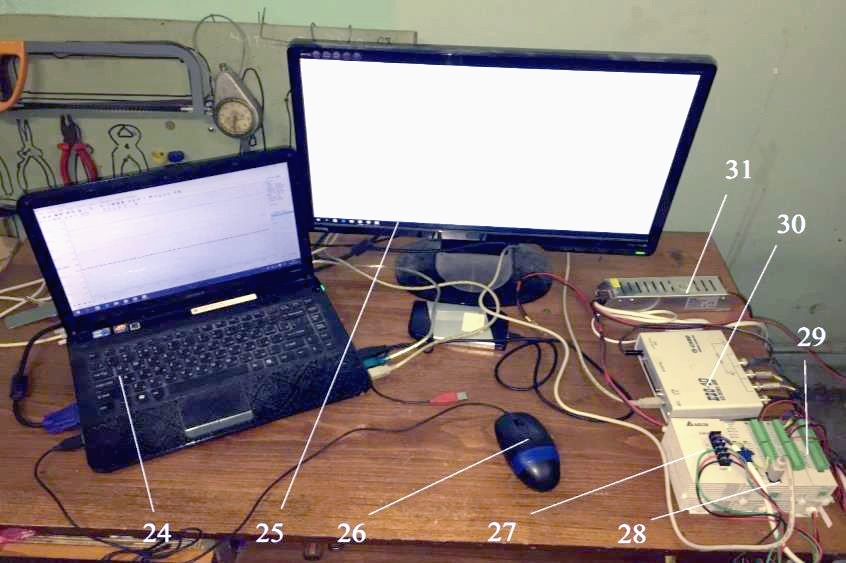
Рисунок 3. Контрольно-измерительный комплекс для исследования пневмопривода: 24 – компьютер; 25 – внешний монитор; 26 – мышь; 27 – блок питания ПЛК; 28 – ПЛК; 29 – модуль аналогового расширения; 30 – аналого-цифровой преобразователь E20‑10; 31 – блок питания 24В; 32 – рамка.
Экспериментальный стенд базируется на пневмоаппаратуре компании Camozzi и позволяет исследовать большинство кинематических характеристик линейного позиционного пневмопривода руки-схвата: скорости V(t); перемещения L(t); нагрузки F(V) и др. Взаимосвязи элементов, образующих механическую, пневматическую и управляющую подсистемы стенда, поясняются принципиальной схемой, представленной на рисунке 4.
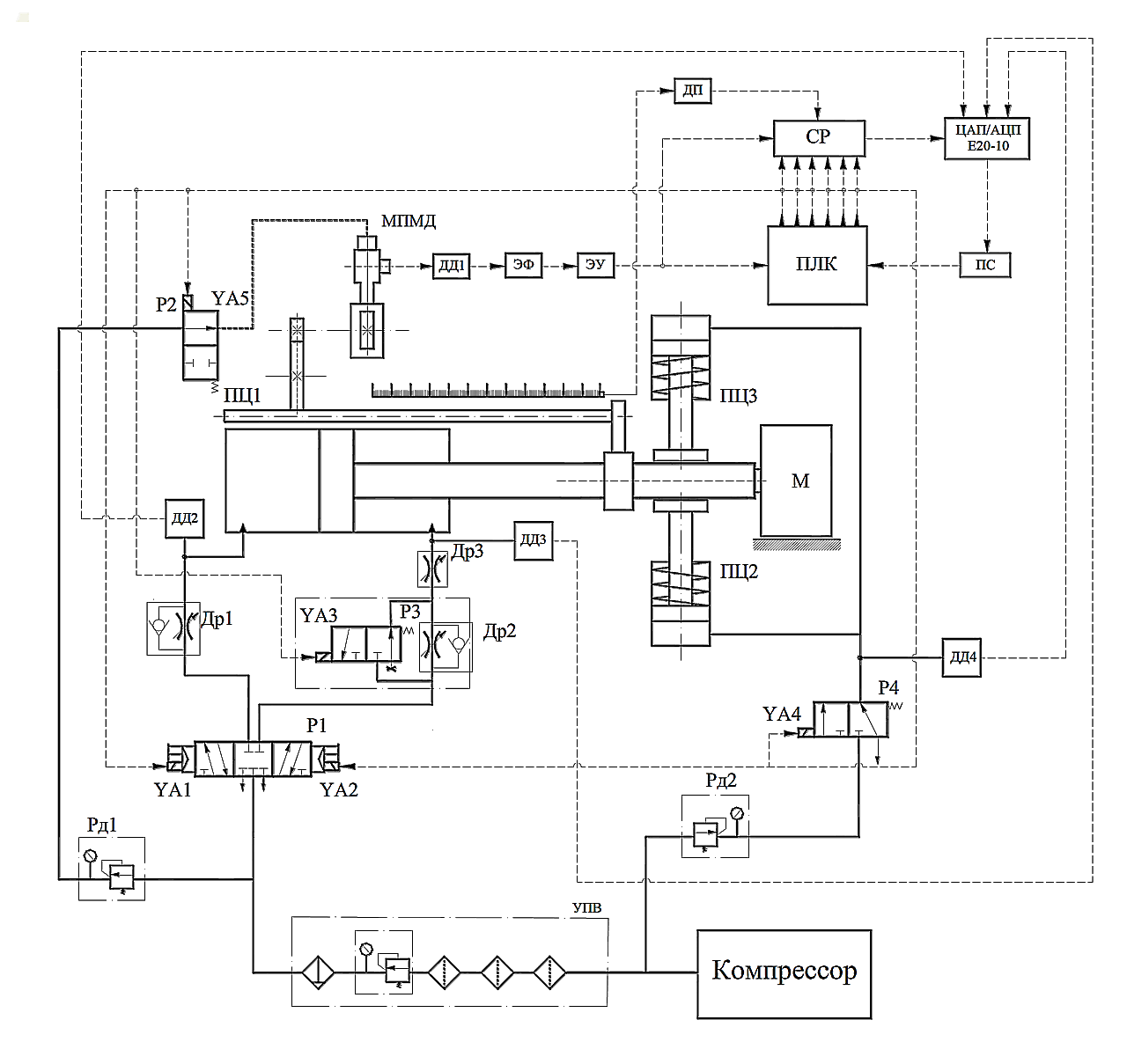
Рисунок 4. Принципиальная пневматическая схема экспериментального стенда.
Программируемый логический контроллер (ПЛК Delta DVP‑28SV) служит для задания координаты перемещения и формирования управляющих сигналов на электромагнитах (YA1‑YA5) пневмораспределителей (Р1‑Р4) в соответствии с заложенным алгоритмом управления позиционным циклом привода. Информация о перемещении исполнительного механизма стенда поступает от многопараметрического пневмомеханического датчика (МПИД), позволяющего преобразовать перемещение пневмоцилиндра ПЦ1 в импульсный электрический сигнал.
Преобразователь ЦАП-АЦП E20-10 обеспечивает управление процессом испытаний, сбор и обработку результатов измерений:
Энергосиловая установка стенда реализована на базе одноступенчатого поршневого компрессора JUN‑AIROF302‑25B и узла подготовки воздуха (УПВ) (рисунок 4).
Экспериментальный стенд позволяет выполнить исследования:
Пневмомеханические части стенда позволяют исследовать позиционный пневмопривод в определенном диапазоне значений параметров, и в дальнейшем, применяя методы масштабирования, проецировать результаты на больший диапазон параметров.
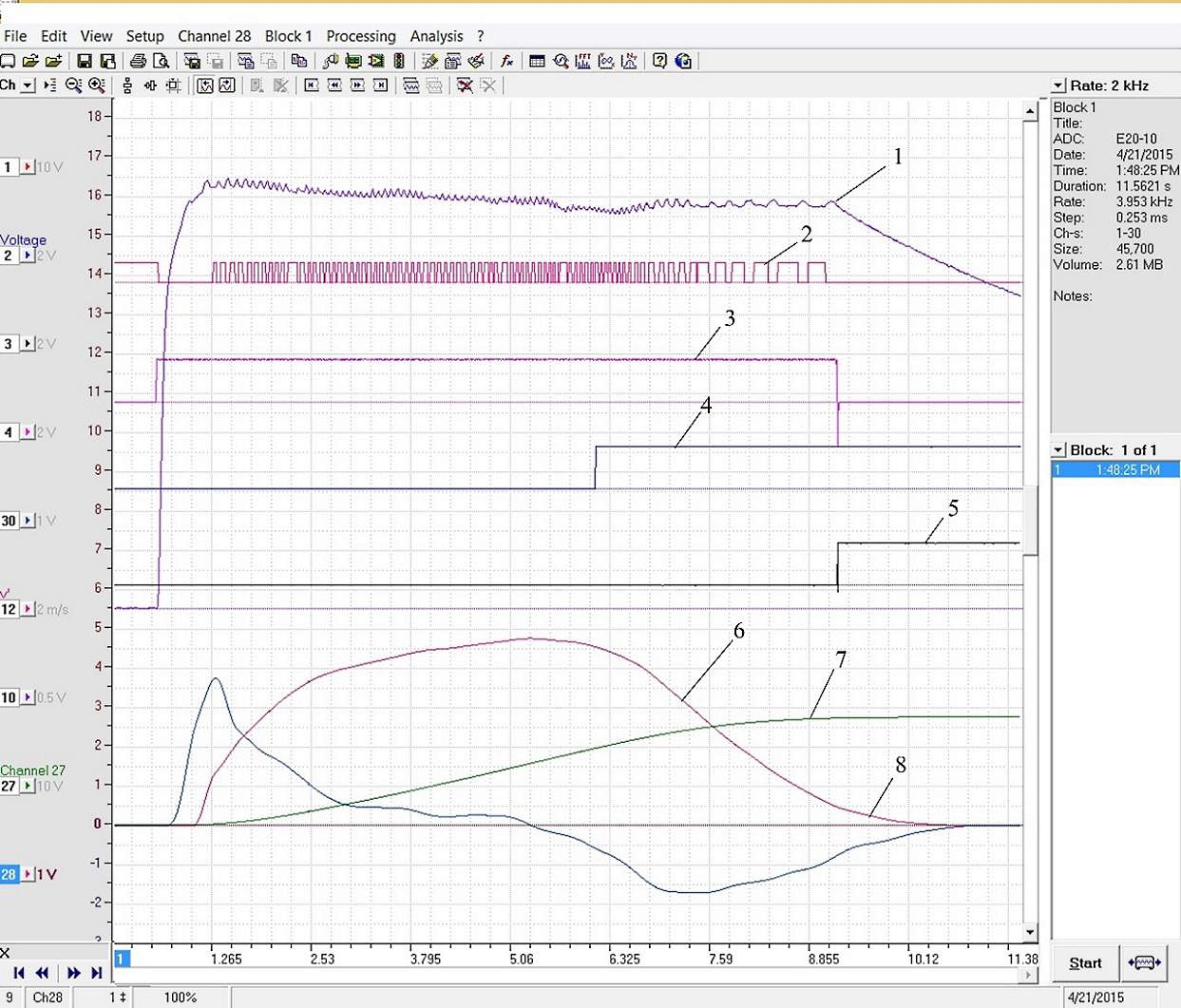
Рисунок 5. Пример результатов, полученных в программе PowerGraph в реальном времени: 1 – давление от ПМД; 2 – импульсный сигнал; 3 – сигнал управления u1; 4 – сигнал управления u2 на замедление; 5 – сигнал управления u3 на остановки; 6 – скорость; 7 – перемещение; 8 – ускорение.
Источник:
Дао Тхе Ань, Полешкин М.С. Методические указания к выполнению лабораторной работы «Исследование рабочего цикла пневматического позиционного привода с управлением ПЛК». – Ростов-на-Дону. – ДГТУ. – 2016. – 20 с.
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон: +7 (495) 785-95-25
Письма и запросы: lcard@lcard.ru
Отдел продаж: sale@lcard.ru
Мы работаем с юридическими и физическими лицами, пожалуйста, прикладывайте реквизиты при оформлении заказа
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск