 +7 (495) 785-95-25
+7 (495) 785-95-25 lcard@lcard.ru
lcard@lcard.ru
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
В Московском государственном индустриальном университете был разработан учебно-исследовательский стенд (УИС), позволяющий обучающимся детально изучить структуру и принципы работы одной из основных систем современных автомобилей – электронной системы управления (ЭСУ) двигателем внутреннего сгорания (ДВС). Стенд включает в себя электронный блок управления двигателем, набор исполнительных механизмов и автономные подсистемы управления частотой вращения коленчатого вала двигателя и расходом воздуха (рисунок 1). Существенным достоинством стенда является отсутствие самого ДВС, что позволяет эксплуатировать его в любом помещении, где имеется возможность подключения к электросети 220 В, 50 Гц. Для сопряжения между УИС и персональным компьютером было решено использовать модуль АЦП E14‑440.
Сбор данных со стенда осуществляется при помощи встроенных портов АЦП. Недостаточное количество выходов ЦАП модуля компенсируется использованием цифровых выходов и схем ШИМ. Это возможно для эмулирования сигналов «медленных» датчиков, например датчиков температуры, детонации и других. Управление выходными сигналами осуществляется при помощи разрабатываемого программного обеспечения. По результатам работы модели строится массив выходных данных с учетом канала, по которому будет осуществлен вывод величины и производится передача управляющих воздействий на ЦАП и цифровые выходы.
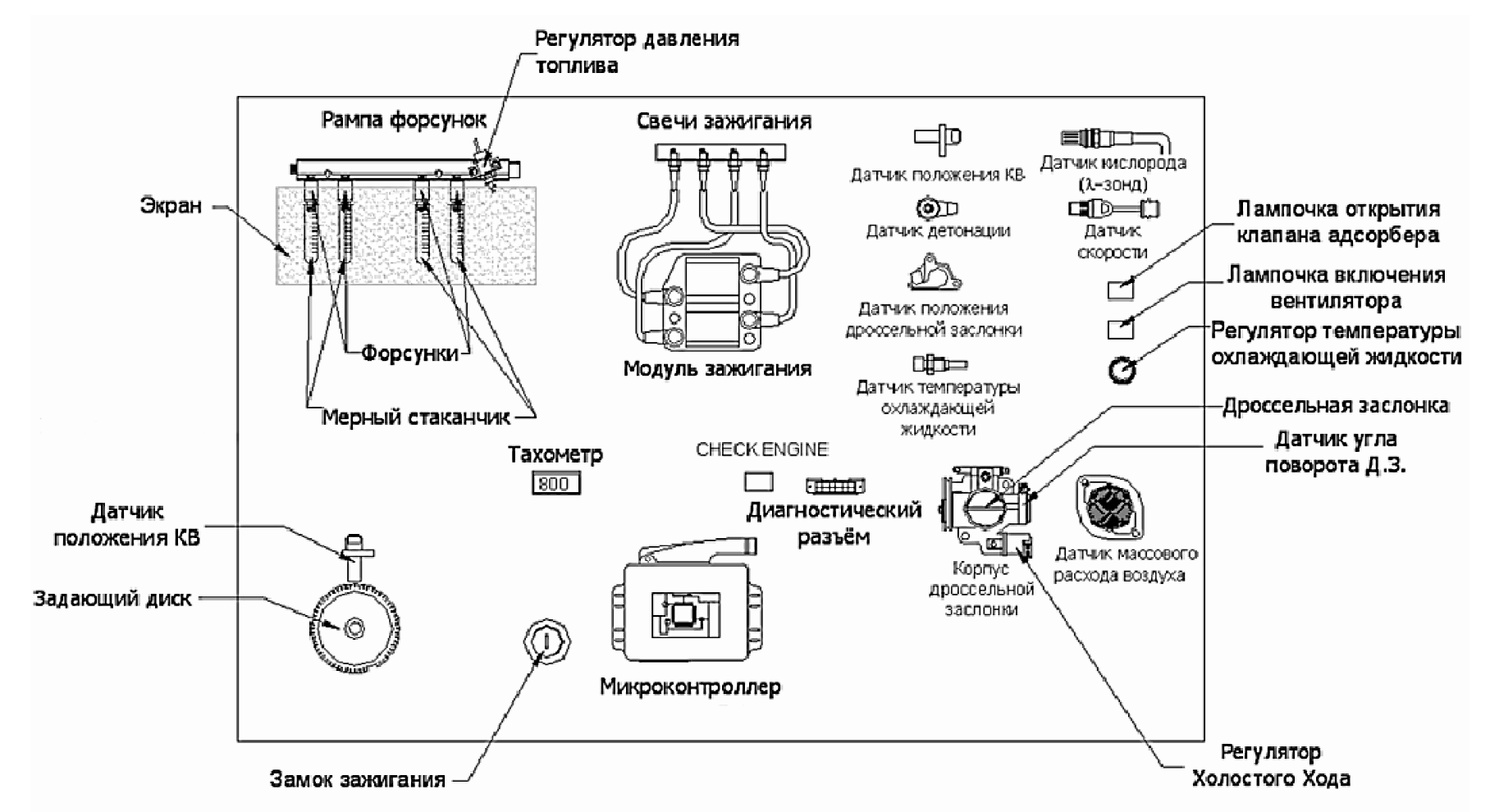
Рисунок 1. Структурная схема учебно-исследовательского стенда.
Однако отказ от использования ДВС приводит к невозможности получения достоверного сигнала некоторых датчиков, а также отсутствию связи между подсистемами ЭСУ ДВС. Решить данную проблему возможно, используя модель ДВС и замкнув обратные связи системы управления. Данный подход позволяет получить систему полунатурного моделирования ЭСУ ДВС (рисунок 2).
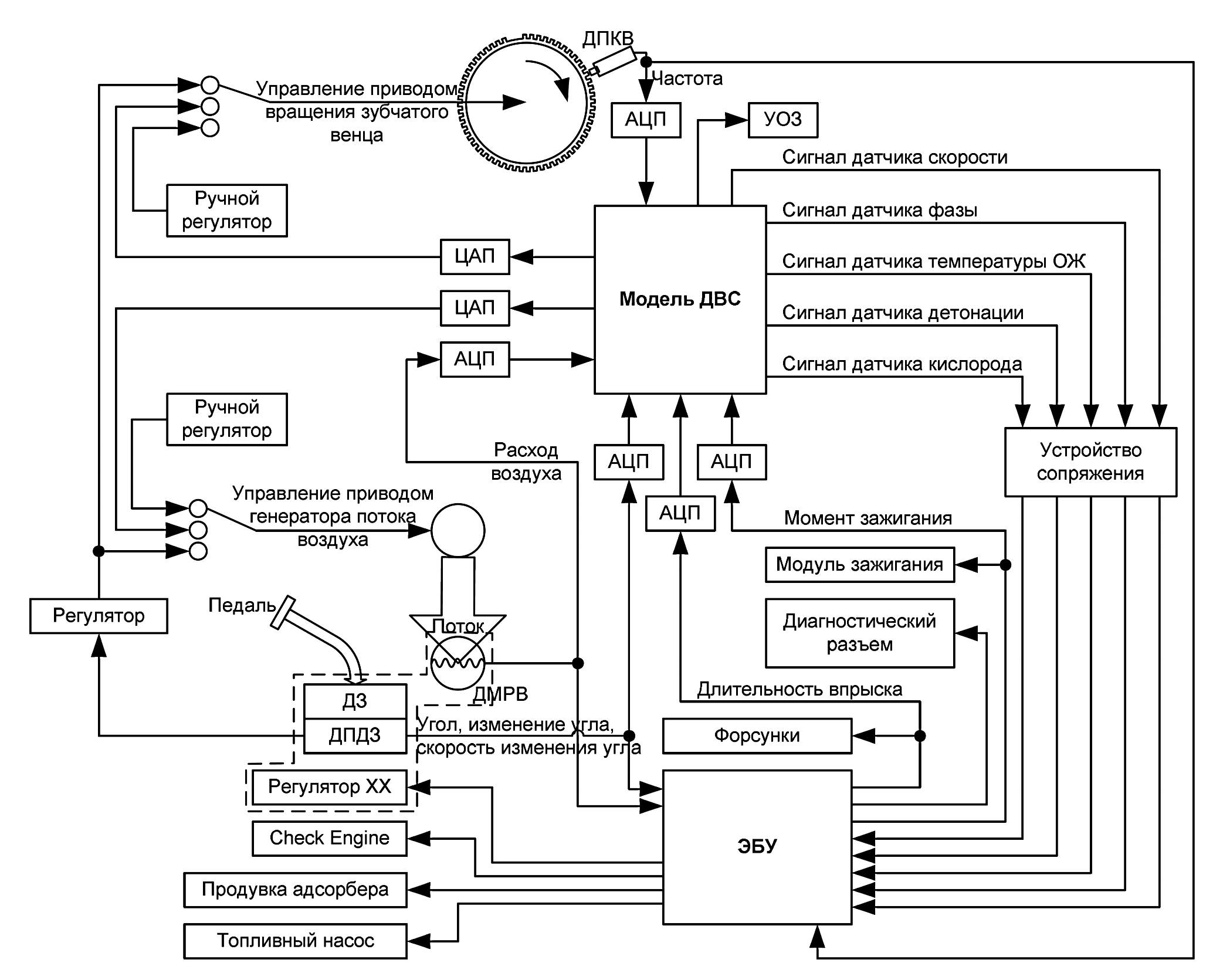
Рисунок 2. Структурная схема полунатурной модели ЭСУ ДВС.
В рамках используемого подхода к моделированию была сформирована базовая структура модели ДВС в первом приближении (рисунок 3).
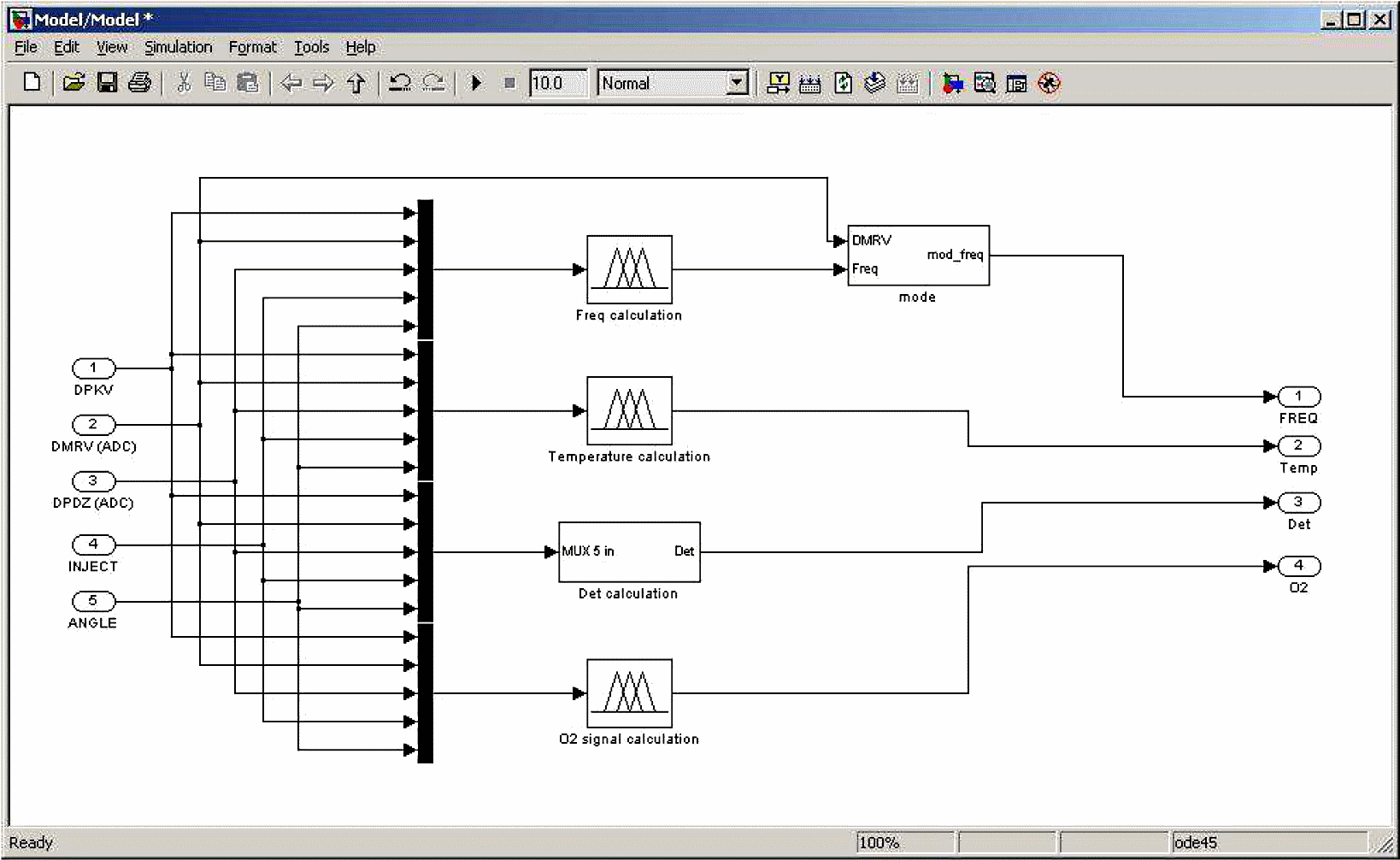
Рисунок 3. Структура модели ДВС.
Модель работает со следующими сигналами:
Вход:
Выход:
Модель реализована в пакете MATLAB. Большинство подсистем реализовано на основе нечетких алгоритмов типа Сугено, что объясняется необходимостью обучения на основе выборок данных, полученных с реальной системы. Это, в свою очередь, накладывает и определенные ограничения, связанные с дроблением на подсистемы, чего не требует механизм нейронных сетей. Однако его использование в рамках пакета MATLAB на сегодняшний день не позволяет разрабатывать real-time приложения, что является необходимым условием работы полунатурной модели.
В настоящее время в первом приближении реализована модель ДВС для полунатурного моделирования и ведутся работы по ее уточнению. Также разрабатываются узлы физического сопряжения модели с ЭБУ. Таким образом, реализация этого проекта должна обеспечить учащимся возможность комплексного изучения ЭСУ ДВС, предоставляя возможность моделирования различных ситуаций и оценки эффективности алгоритмов управления.
Источник:
Палагута К.А., Чиркин С.Ю., Тройков С.М. Использование среды MATLAB для моделирования системы управления ДВС // Труды международного симпозиума «Надежность и качество». Изд.: Пензенский ГУ. – 2011. – Т. 1. – С. 58‑60.
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4
Многоканальный телефон: +7 (495) 785-95-25
Письма и запросы: lcard@lcard.ru
Отдел продаж: sale@lcard.ru
Мы работаем с юридическими и физическими лицами, пожалуйста, прикладывайте реквизиты при оформлении заказа
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск