 +7 (495) 785-95-25
+7 (495) 785-95-25 +7 (495) 785-95-14
+7 (495) 785-95-14 sale@lcard.ru
sale@lcard.ru English version
English version
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
Лабораторией инновационных технологий Казахского национального педагогического университета имени Абая разработана технология использования энергии центробежных сил инерции.
Предварительно (в публикации [1]) был приведен анализ одной из возможных кинематических схем колесного планетарного механизма с дебалансной массой, математическая модель которого представлена на рисунке 1.
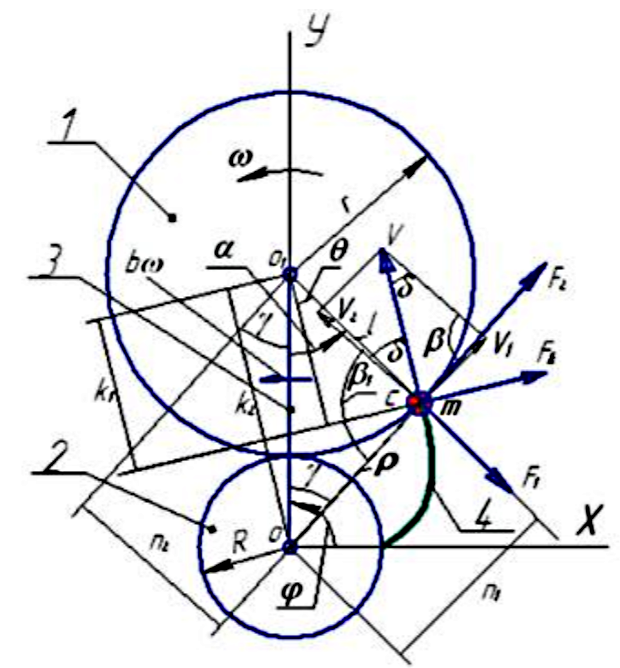
Рисунок 1. Математическая модель инерционного механизма: 1 – колесо; 2 – центральное колесо; 3 – водило; 4 – эпициклоида.
Механизм состоит из колеса 1 радиусом r, которое обкатывается с угловой скоростью без скольжения по заторможенному центральному колесу 2 радиусом R в горизонтальной плоскости (для исключения влияния сил тяжести) при помощи водила 3, которое будет вращаться с некоторой угловой скоростью, которая определяется геометрическим соотношением радиусов колес. На колесе 1 на расстоянии l от центра его вращения размещена масса m. Для нашего примера l =r. При этом центр массы m будет перемещаться по эпициклоиде 4. Модуль эпициклоиды b определяет её форму, соотношение между углами поворота и угловыми скоростями колеса 1 и водила 3. Характер эпициклоиды является циклическим, и в зависимости от модуля изменяется частота этих циклов.
Для экспериментальных исследований (публикация [2]) изготовлен стенд инерционного механизма, кинематическая схема которого представлена на рисунке 2.

Рисунок 2. Кинематическая схема экспериментального стенда инерционного механизма.
Экспериментальный стенд состоит из трех зубчатых колес 1, обкатывающих центральное зубчатое колесо 2; водила 3, шарнирно установленного на оси центрального колеса 2; эксцентрических масс 4, жестко установленных на колесах 1, которые подвижно установлены на водиле 3; привода 5 в виде электродвигателя; кинематической связи 6; обгонной муфты 7. Центральное зубчатое колесо 2 жестко установлено на валу 8, который подвижно установлен в упорном подшипнике подпятника 9 и радиальном подшипнике 10. Электродвигатель 5 и подшипники 9, 10 установлены в корпусе. Вал 8 установлен вертикально (для устранения влияния сил тяжести) и снабжен плечом 11. Стенд снабжен счетчиками импульсов с датчиками 12 и 13 соответственно для измерения числа оборотов водила и привода. Также стенд снабжен тензометрической балкой 14, жестко защемленной на плече 11.
Электродвигатель 8 через кинематическую связь 6 и обгонную муфту 7 приводит во вращение водило 3, которое, в свою очередь, воздействует на три зубчатых колеса 1. Эти колеса обкатываются вокруг центрального колеса 2. Эксцентрические массы 4 при вращении создают знакопеременные крутящие моменты от сил инерции относительно центра вращения колес 1 и центра вращения водила 3. Поскольку центральное колесо 2 жестко установлено на подвижном валу 8, то о силовом воздействии колес 1 на колесо 2 можно судить по силовому воздействию плеча 11 на тензометрическую балку 14.
Фотография стенда с приводом от шпинделя сверлильного станка представлена на рисунке 3.

Рисунок 3. Экспериментальный стенд для исследования инерционного механизма.
Соотношение числа оборотов привода к числу оборотов водила 3 за одну минуту при разных скоростях шпинделя представлено на графике (рисунок 4). Эксперименты показали, что при возрастании скорости вращения привода от 150 об/мин, водило вращается быстрее привода, то есть обгоняет привод. Этот обгон достигает значения в 1,95 раза при скорости вращения от 400 до 800 об/мин, затем несколько падает.
Определение крутящего момента на центральном валу инерционного измерения производилось при помощи системы сбора данных LTR-U-1, укомплектованной тензометрическим модулем LTR212, и программы LGraph2. Сначала производилась тарировка тензометрической балки при помощи грузов в 500 граммов. По графику тарировки в программе LGraph2 определялся коэффициент пересчета [H·м/B].
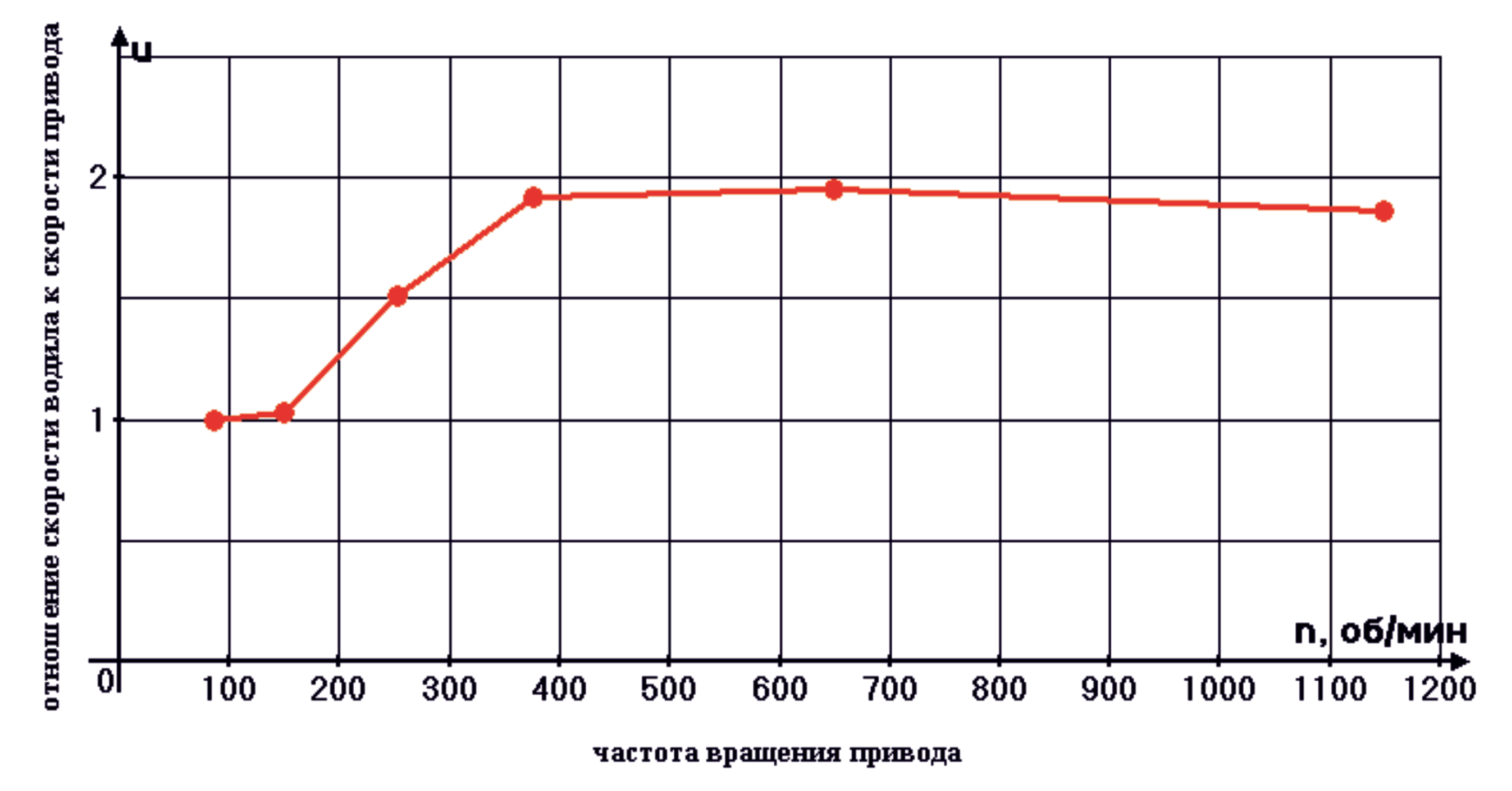
Рисунок 4. График соотношения угловых скоростей привода и водила механизма.
Обработанные результаты экспериментов по исследованию крутящего момента на центральном валу при различных скоростях привода представлены на рисунке 5. Характер кривой изменения крутящего момента на центральном валу инерционного механизма похож на кривую соотношения угловых скоростей привода и водила механизма (рисунок 5).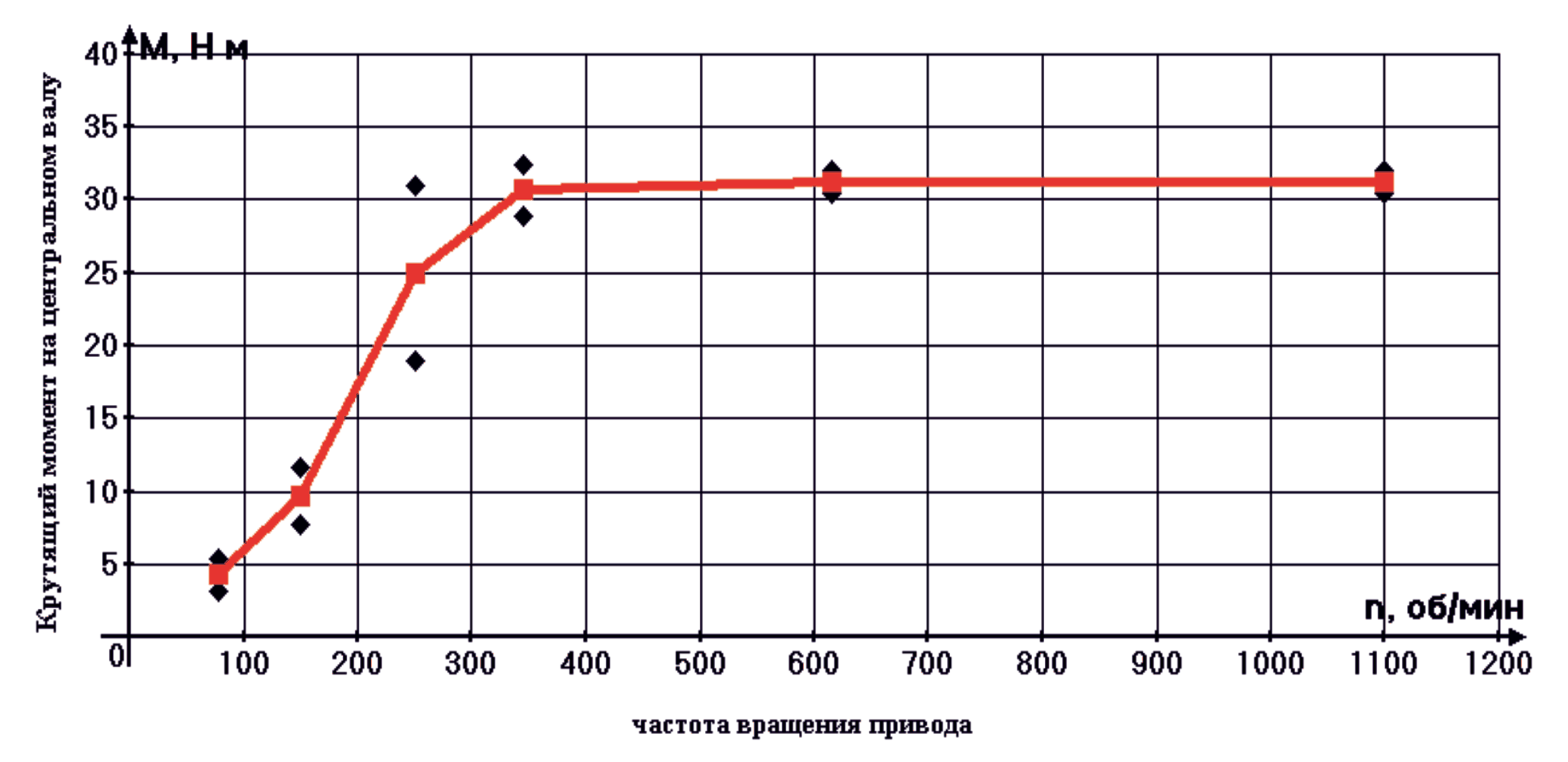
Рисунок 5. График экспериментальных зависимостей крутящего момента на центральном валу от скорости вращения привода.
Проведенные экспериментальные исследования доказывают возможность практического использования центробежных сил инерции вращающихся эксцентрических масс для создания полезной мощности.
Работа выполнена в рамках гранта Комитета науки Министерства образования и науки Республики Казахстан (номер госрегистрации 0113РК00415).
Источники:
1. Лысенко В.С., Пралиев С.Ж., Сулейменов Б.Т., Баубеков С.Д. Анализ инерционного механизма // Современные наукоемкие технологии. – 2012. – № 12. – С. 20–23.
2. Лысенко В.С., Кулжабаев Б.Д. Экспериментальные исследования инерционного механизма // Современные наукоемкие технологии. – 2015. – № 10. – С. 48 -51.
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4, стр. 2
Многоканальный телефон:
+7 (495) 785-95-25
Факс: +7 (495) 785-95-14
Отдел продаж: sale@lcard.ru
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск