 +7 (495) 785-95-25
+7 (495) 785-95-25 +7 (495) 785-95-14
+7 (495) 785-95-14 sale@lcard.ru
sale@lcard.ru English version
English version
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
Модуль Е14‑140 был применён в экспериментальном стенде для исследования динамических процессов, протекающих в сложной мехатронной системе, состоящей из привода ведущего вала сцепления автомобиля, электромеханического привода выключения сцепления и системы автоматического управления приводами [1].
Схема экспериментального стенда представлена на рисунке 1. Основным элементом стенда является привод выключения сцепления, состоящий из мотор-редуктора 6, троса 5, соединенного с рычагом на выходном валу мотор-редуктора, и вилки 4.

Рисунок 1. Схема экспериментального стенда: 1 – электродвигатель; 2 – сцепление; 3 – нагрузка; 4 – вилка; 5 – трос; 6 – мотор-редуктор; 7, 8 – датчики скоростей ведущего и ведомого валов; 9 – датчик усилия; 10 – датчик перемещения; 11 – ПЭВМ; 12 – конвертер; 13 – преобразователь частоты.
Роль привода ведущего вала сцепления выполняет асинхронный электродвигатель 1, подключенный к ПЭВМ 11 через частотный преобразователь 13 и конвертер 12, что позволяет бесступенчато регулировать частоту вращения вала. Эксперименты проводились при скорости вращения вала электродвигателя рад/с. Программа управления стендом разработана в среде Borland C++ и реализует пропорционально-интегрально-дифференциальный (ПИД) регулятор.
Экспериментальный стенд для исследования динамики управляемого электромеханического привода сцепления представлен на рисунке 2.

Рисунок 2. Экспериментальный стенд.
Система автоматического управления (САУ) электромеханическим приводом сцепления автомобиля (рисунок 3). Силовая подсистема включает в себя привод М1 ведущего вала 1 сцепления 2, которое передает крутящий момент ведомому валу 3. Также в силовую подсистему входит привод выключения сцепления, состоящий из мотор-редуктора М2 и рычажной системы. Информационная подсистема включает в себя датчики Д1 и Д2 угловых скоростей ведущего 1 и ведомого 3 валов сцепления соответственно, датчик усилия Д3, создаваемого приводом выключения сцепления, и датчик Д4 угла поворота выходного вала мотор-редуктора М2. Управляющая подсистема состоит из блока обработки сигналов датчиков, блока управления приводом ведущего вала сцепления, блока управления приводом выключения сцепления и центрального блока управления.
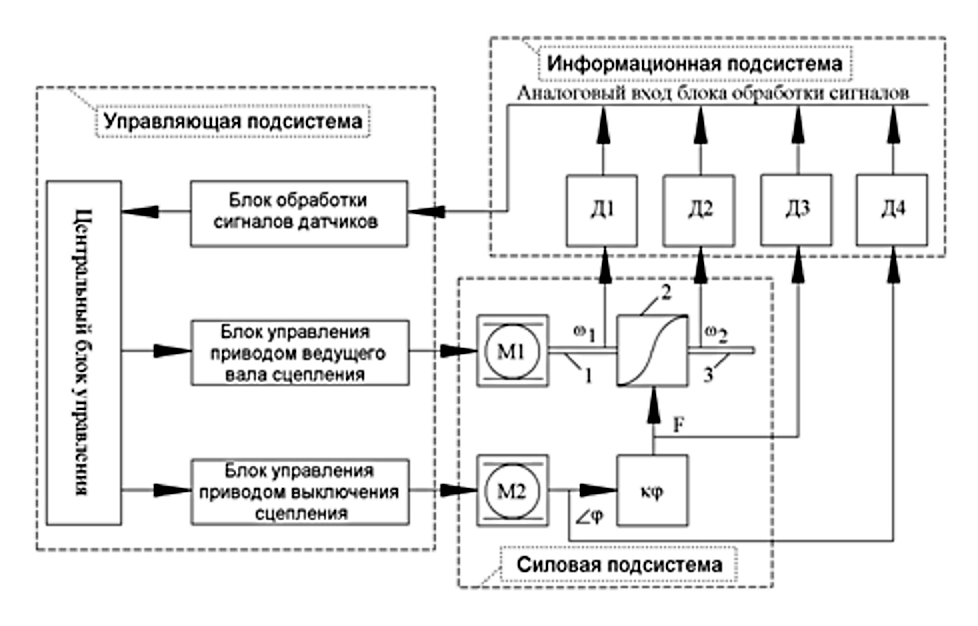
Рисунок 3. Функциональная схема системы автоматического управления (САУ).
Моделирование работы САУ выполнено в среде MathLab Simulink. На рисунке 4 (слева) отчетливо видны нежелательные колебания при включении сцепления, а на рисунке 4 (справа) колебания отсутствуют благодаря введению ПИД-регулятора в систему управления.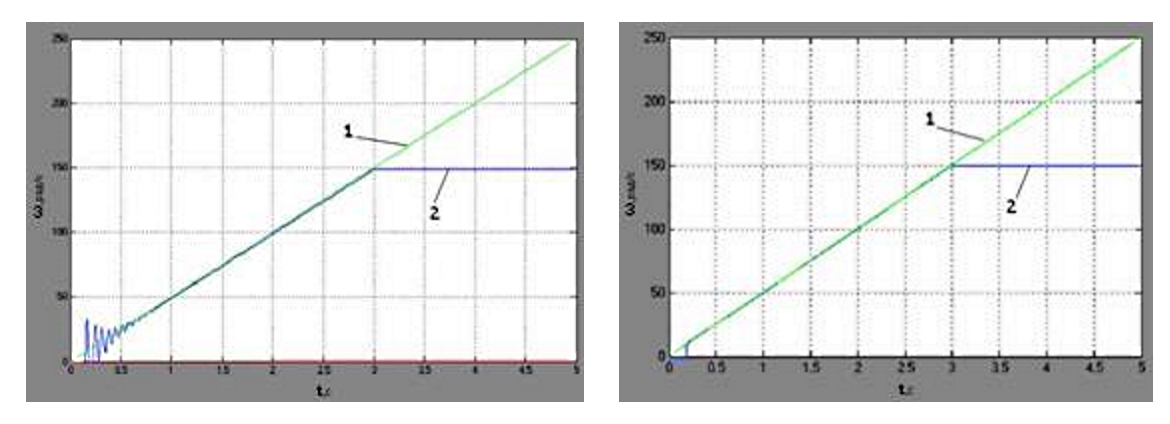
Рисунок 4. Зависимость скоростей валов без ПИД-регулирования (слева); зависимость скоростей валов при наличии ПИД-регулирования (справа).
Приводим некоторые результаты диссертационной работы, непосредственно связанные с экспериментом:
Источник:
Емельянов И.П. Исследование динамики управляемого электромеханического привода сцепления автомобиля: автореферат диссертации на соискание ученой степени кандидата технических наук. – Курск. – 2007. – 16 с.
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4, стр. 2
Многоканальный телефон:
+7 (495) 785-95-25
Факс: +7 (495) 785-95-14
Отдел продаж: sale@lcard.ru
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск