+7 (495) 785-95-25
+7 (495) 785-95-25 +7 (495) 785-95-14
+7 (495) 785-95-14 sale@lcard.ru
sale@lcard.ru English version
English version
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
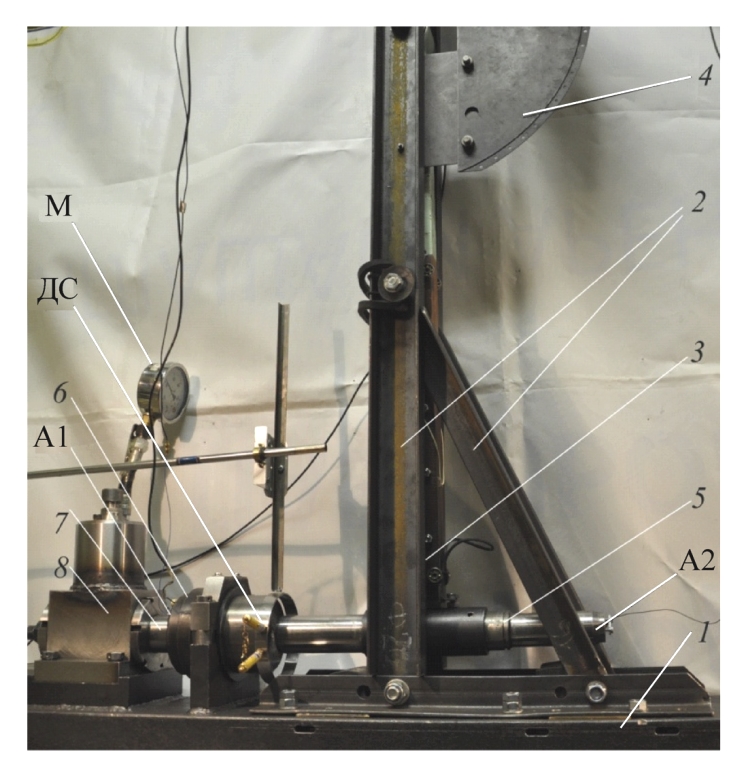
Исследователи из Института горного дела им. Н.А. Чинакала СО РАН разработали стенд с маятниковым копром для моделирования динамики системы "боек – инструмент – горный массив" (рисунки 1, 2) [1]. Сбор данных от датчиков осуществлялся с помощью модуля E14‑440.
Для имитации массива использовали газожидкостный демпфер с регулировками, металлическую плиту, мраморный блок. В экспериментах сравниваются результаты измерений ударных импульсов в бойке и инструменте и коэффициенты восстановления скорости бойка, полученные при взаимодействии бойка и инструмента с демпфирующим устройством и с блоком горной породы.
|
Рисунок 1. Экспериментальный стенд: 1 – швеллер-основание; |
Рисунок 2. Маятниковый стенд и мраморный блок: 1 – укороченный швеллер-основание; 2 – мраморный блок; 3 – клиновидный инструмент; 4 – лапы; 5 – болты. |
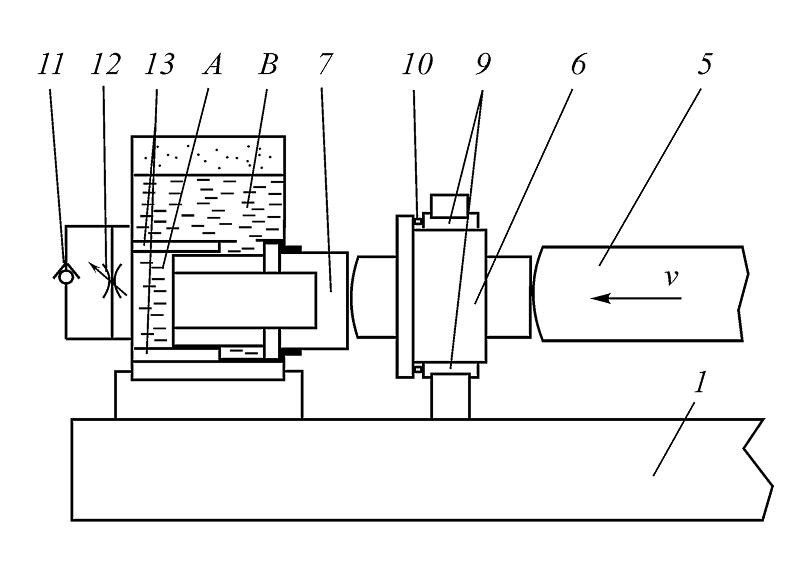
Рисунок 3. Схема эксперимента с демпфирующим устройством: 1 – швеллер-основание; 5 – боек; 6 – инструмент; 7 – поршень; 9 – обойма; 10 – резиновое кольцо; 11 – обратный клапан; 12 – дроссель; 13 – цилиндр.
При помощи оптического датчика ДС, представляющего собой две пары лазеров и фотодиодов (рисунок 1) и регистрировавших моменты Т1 и Т2 прохождения лучей передним торцом бойка, определяли скорости бойка до и после удара.
Для измерения ускорений использовались вибропреобразователи АРЗЗ фирмы ГлобалТекст и усилители заряда фирмы Bruel&Kjaer 2651. Скорости бойка и инструмента определялись интегрированием сигналов с соответствующих вибропреобразователей. Сигналы от датчиков регистрировались через аналого-цифровой преобразователь L-Card E14‑440 на персональном компьютере и обрабатывались при помощи программы PowerGraph 3.3.
Ниже приведены осциллограммы нескольких серий экспериментов с ограничителями (демпфирующим устройством, металлической плитой и мраморным блоком), а также серия ударов без ограничителя. В каждой серии использовали разные инструменты и варьировали предударную скорость бойка. В случае ударов по демпфирующему устройству варьировали также затяжку регулировочного винта.
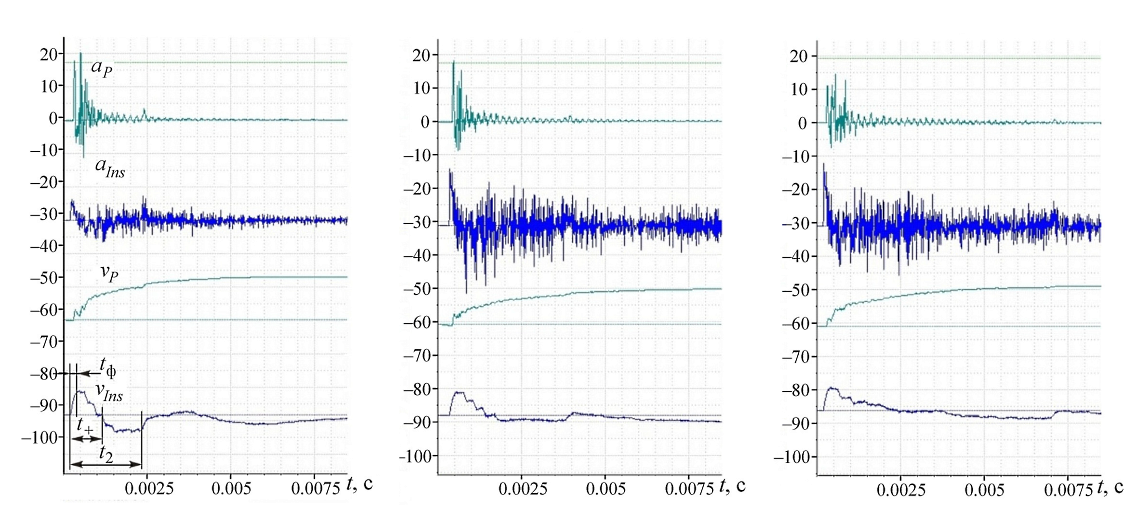
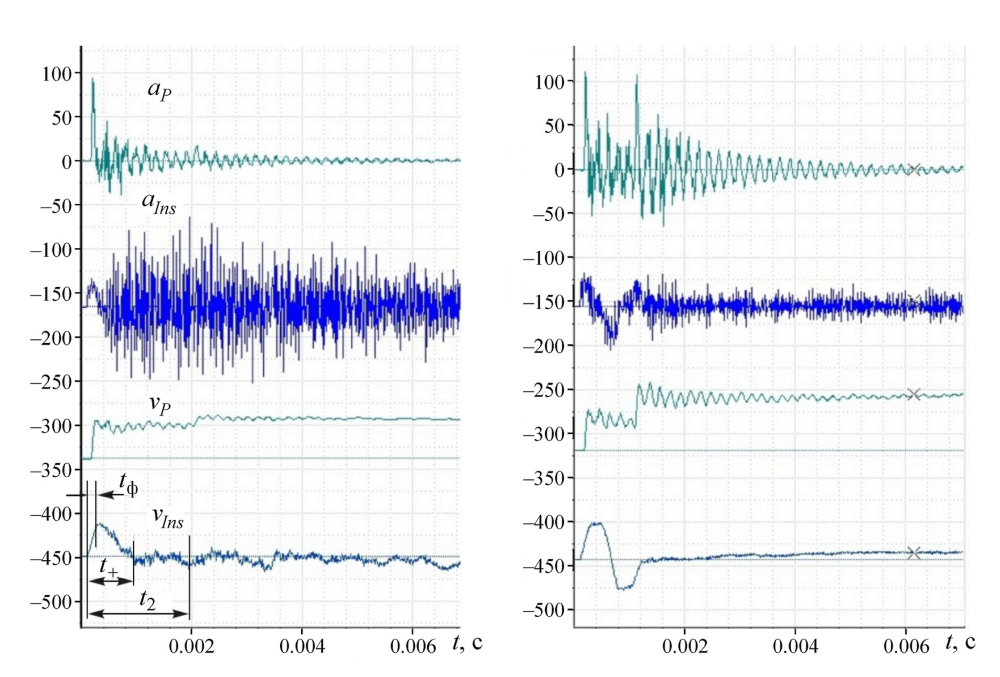
Рисунок 4. Осциллограммы ускорений инструмента aIns и бойка aP и полученных интегрированием скоростей инструмента vP и бойка vIns при взаимодействии системы "боек – инструмент" с демпфирующим устройством при затяжке регулировочного винта буфера 0 (а), 0.5 (б) и 2 (в) оборота. Масса инструмента 9.6 кг; tф – длительность фронта; t+ – длительность положительной фазы; t2 – период времени до повторного взаимодействия бойка и инструмента.
|
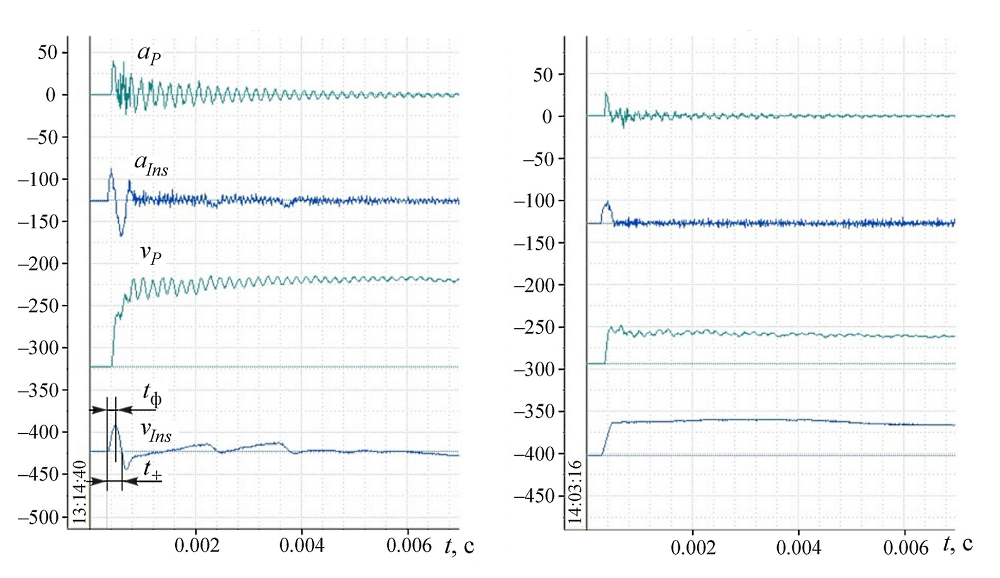
Рисунок 5. Осциллограммы aIns, aP, vIns, vP, полученные при взаимодействии системы "боек – инструмент" с мраморным блоком. Масса инструмента 9.6 кг: а – инструмент с клиновидной ударной частью; б – инструмент со сферической ударной частью. Обозначения см. на рисунке 4. |
Рисунок 6. Осциллограммы aIns, aP, vIns, vP, полученные при взаимодействии системы "боек – инструмент" с металлической плитой (а) и при отсутствии ограничителя (б). Масса инструмента 9.6 кг. Обозначения см. на рисунке 4. |

Рисунок 7. Зависимости коэффициента восстановления скорости бойка R от оборотов n регулировочного винта, характеризующего сопротивления дросселя: а – инструмент массой 5 кг; б – инструмент массой 9.6 кг; в – инструмент массой 15 кг.
Основные результаты и выводы:
1. Разработан стенд с использованием маятникового копра, позволяющий моделировать и исследовать динамику ударного взаимодействия системы "боек – инструмент – горный массив" с изменением скорости бойка, масс бойка и инструмента.
2. Осциллограммы ударных импульсов в бойке и инструменте, полученные в опытах, показывают возможность при изучении динамики ударных систем, создаваемых для разрушения горных пород, моделировать горный массив газожидкостным демпфирующим устройством с соответствующим образом подобранными параметрами.
3. Проведенные эксперименты подтвердили возможность моделировать коэффициент восстановления скорости бойка в диапазоне R = 0.05 – 0.3 при помощи газожидкостного демпфирующего устройства.
Источник:
Городилов Л.В., Ефимов В.П., Кудрявцев В.Г. Моделирование процесса взаимодействия системы "боёк – инструмент" с горным массивом на стенде // Физико-технические проблемы разработки полезных ископаемых. – Новосибирск. – 2013. – № 4. – С. 116‑124.
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4, стр. 2
Многоканальный телефон:
+7 (495) 785-95-25
Факс: +7 (495) 785-95-14
Отдел продаж: sale@lcard.ru
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск