 +7 (495) 785-95-25
+7 (495) 785-95-25 +7 (495) 785-95-14
+7 (495) 785-95-14 sale@lcard.ru
sale@lcard.ru English version
English version
Меню

+7 (495) 785-95-25
sale@lcard.ru
sale@lcard.ru
Тройное применение модуля АЦП E14-440 мы находим в диссертационной работе [1], посвящённой разносторонним аспектам задачи обнаружения гидродинамических источников (ГДИ). К числу естественных ГДИ относятся внутренние волны, течения, вихревые структуры и т.д. В качестве искусственных источников могут выступать различного характера неровности дна, опорные конструкции платформ, которые при обтекании их течениями образуют гидродинамические возмущения, канализационные стоки и т.д.
В диссертации рассмотрены три оптические системы обнаружения различных признаков ГДИ c применением АЦП E14-440:
Рисунок 1 поясняет принцип образования аэрозоля над поверхностью моря.
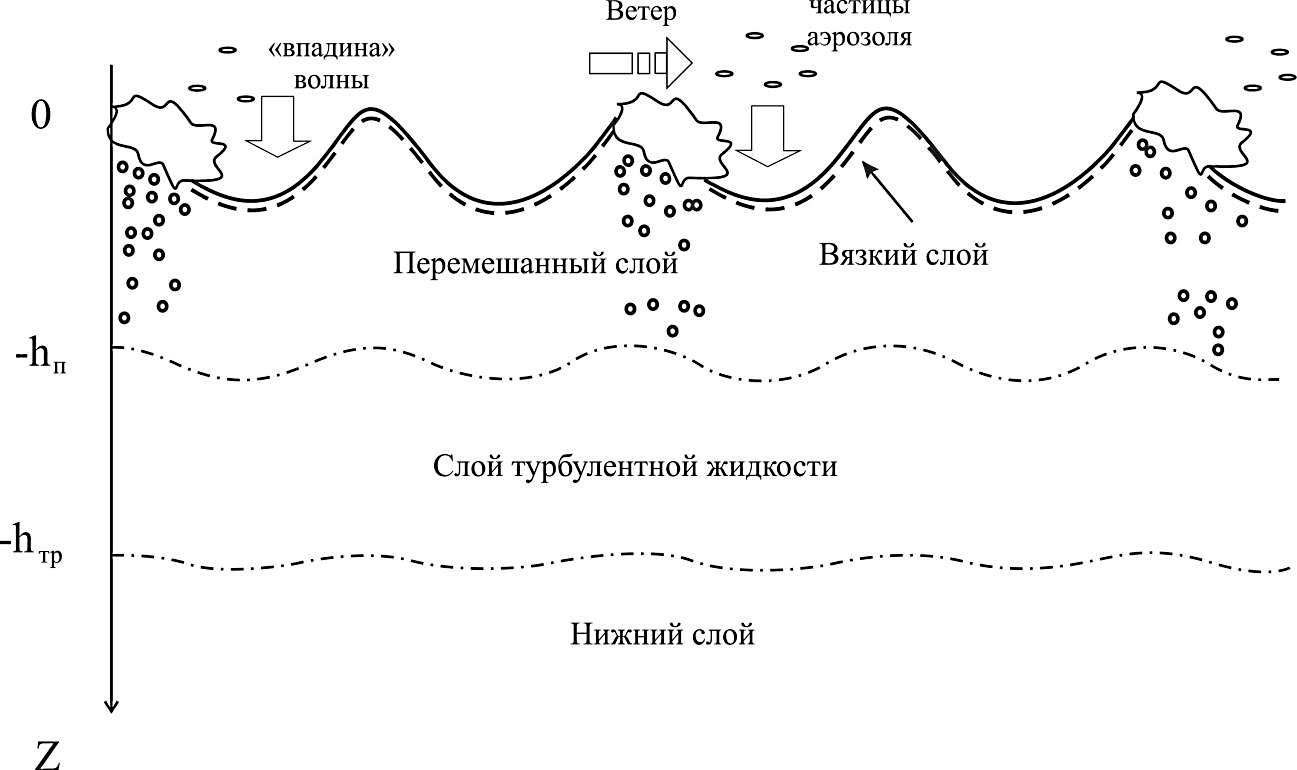
Рисунок 1. Схема процесса сдувания аэрозоля с гребней поверхностных волн.
Схемы вышеупомянутых оптических систем с пояснениями приведены на рисунках 2, 3, 4.
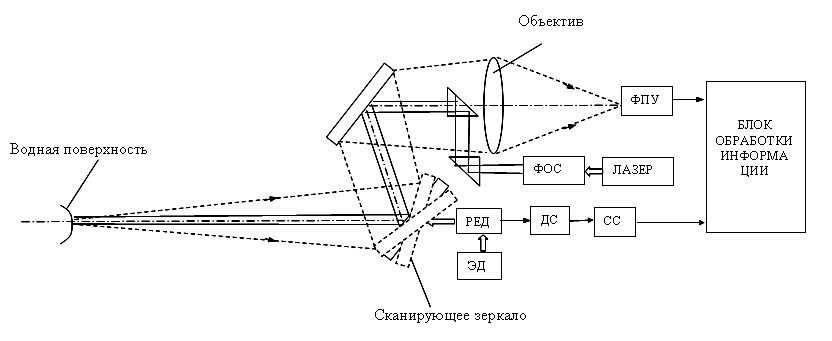
Рисунок 2. Схема разработанного лазерного локатора: (ФОС – формирующая оптическая система; ЭД – электродвигатель; РЕД – редуктор; ФПУ – фотоприемное устройство; ДС – датчик синхронизации; СС – система синхронизации).
На схеме (рисунок 2) представлены два канала макета локатора: канал подсветки и приемный канал. Канал подсветки предназначен для создания и формирования узкого коллимированного лазерного пучка, направленного на водную поверхность. На рисунке он схематично представлен следующими компонентами: лазером, формирующей оптической системой (ФОС) и двумя прямоугольными призмами. Приемный канал состоит из объектива и фотоприемного устройства (ФПУ). После отражения от водной поверхности излучение лазерного пучка попадает во входной зрачок объектива и фокусируется им в плоскости изображения. С этой плоскостью совмещено положение фоточувствительной площадки фотоприемника. Привод сканирующего зеркала выполнен от электродвигателя (ЭД) через редуктор.
Сигналы с лазерного сканирующего локатора поступают на входы внешнего модуля АЦП E14-440, который осуществляет первичную оцифровку этих сигналов и выдачу их по мере заполнения буфера в ЭВМ через USB.
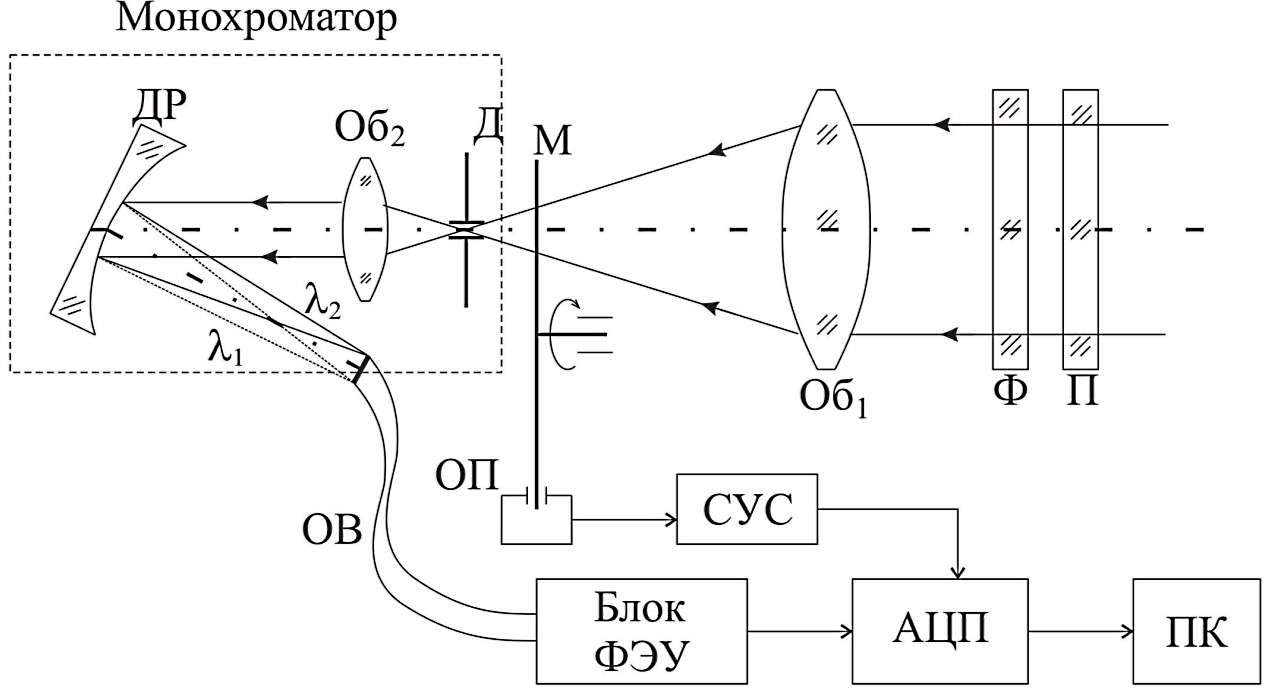
Рисунок 3. Функциональная схема двухканального фотометра яркости моря: (П – поляризатор; Ф – фильтр; Об – объектив; М – модулятор; Д – диафрагма; ДР – дифракционная решетка; ОВ – оптическое волокно; ФЭУ – фотоэлектронный умножитель; ОП – оптопара; СУС – согласующий усилитель).
Входной поток от морской поверхности поступает в спектрофотометр через поляризатор и оптические ослабляющие фильтры, которые расположены перед объективом. Далее установлена виньетирующая диафрагма, за которой расположен вращающийся диск, и далее входная щель монохроматора. Диск осуществляет периодическую модуляцию светового пучка с целью реализации при обработке алгоритма синхронного накопления сигнала с вычитанием темновых шумов. На выходе монохроматора входящий поток оптического излучения от морской поверхности раскладывается в спектр, из которого многомодовыми световодами выделяются световые пучки с нужными длинами волн. Излучение, выделенное световодами, регистрируется двухканальным фотоприемным устройством на основе ФЭУ. Величина зарегистрированного потока оптического излучения зависит от концентрации фитопланктона и растворенного органического вещества в области регистрации. Выходные сигналы спектрофотометра оцифровываются АЦП E14-440 и поступают на компьютер.
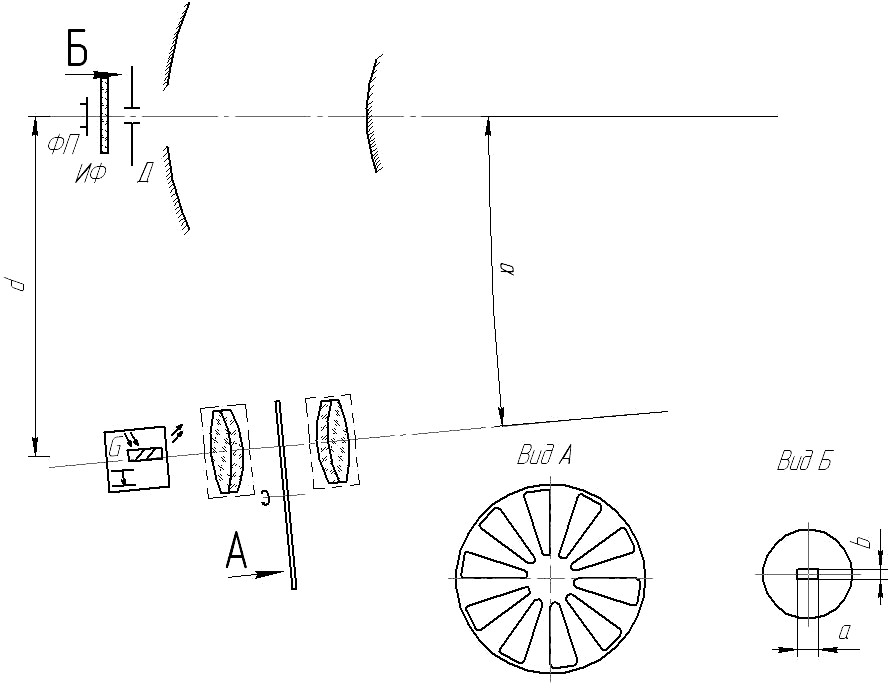
Рисунок 4. Схема первичной обработки сигналов аэрозольного лидара: ФП – фотоприемник; ИФ – интерференционный светофильтр; Д – диафрагма.
Аэрозольный лидар был построен по параксиальной схеме. В состав схемы входят два канала: лазерный осветительный канал и приемный оптико-электронный канал. Лазерный осветительный канал содержит твердотельный лазер. Его излучение прерывалось механическим модулятором, осуществляющим периодическую модуляцию. Приемный канал представляет собой оптико-электронную систему, включающую зеркальный объектив, построенный по схеме Кассегрена, и фотоприемное устройство на основе фотоэлектронного умножителя. Для контроля амплитудной модуляции лазерного излучения использовалась оптопара, установленная на модуляционный диск. Сигнал с оптопары использовался как опорный для определения моментов открытия и закрытия зондирующего лазерного излучения. Модуляция зондирующего лазерного излучения необходима для реализации алгоритма синхронного накопления полезного сигнала. Выходные сигналы аэрозольного лидара через АЦП E14-440 поступают на компьютер, где записываются в память.

Рисунок 5. Расположение макета сканирующего лазерного локатора.

Рисунок 6. Пробные гидродинамические воздействия.

Рисунок7. Размещение макета фотометра на консольном мосту.
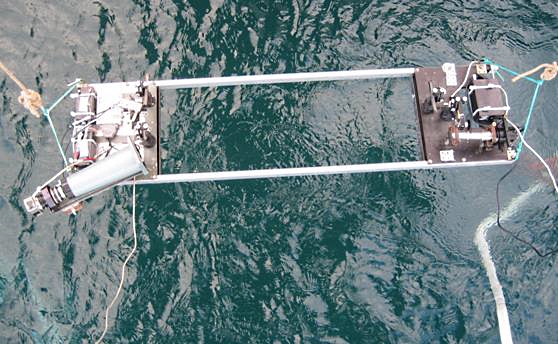
Рисунок 8. Размещение разработанного макета аэрозольного лидара над зоной воздействия искусственных гидродинамических возмущений (ГДВ).
Экспериментальные исследования выполнялись в рамках комплексный испытаний. Объектом исследования были ГДВ, создаваемые движущимся надводным судном.

Рисунок 9. Фотография отстающего следа судна.
На борту судна был размещен комплекс разработанной измерительной аппаратуры (рисунок 10), состоящий из макетов сканирующего лазерного локатора (поз. 1), двухканального спектрофотометра (поз. 2) и аэрозольного лидара (поз. 3).
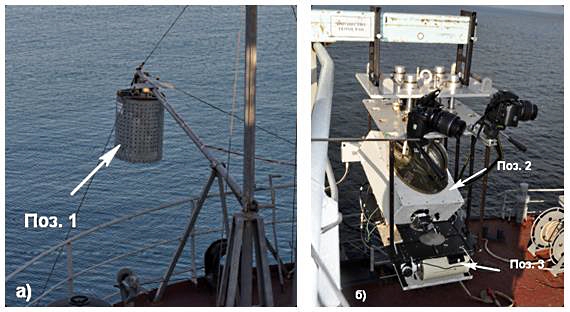
Рисунок 10. Вид комплекса измерительной аппаратуры: (а – размещение сканирующего локатора; б – размещение фотометра и аэрозольного лидара).
Разработанные методики и технические решения реализованы и внедрены:
Источник:
Леонов С.О. Диссертационная работа на соискание ученой степени кандидата технических наук «Программно-аппаратный комплекс для дистанционной регистрации и обработки информации о проявлениях гидродинамических источников». – М. – 2015. – 160 с.
Адрес: 117105, Москва, Варшавское шоссе, д. 5, корп. 4, стр. 2
Многоканальный телефон:
+7 (495) 785-95-25
Факс: +7 (495) 785-95-14
Отдел продаж: sale@lcard.ru
Техническая поддержка: support@lcard.ru
Время работы: с 9-00 до 19-00 мск